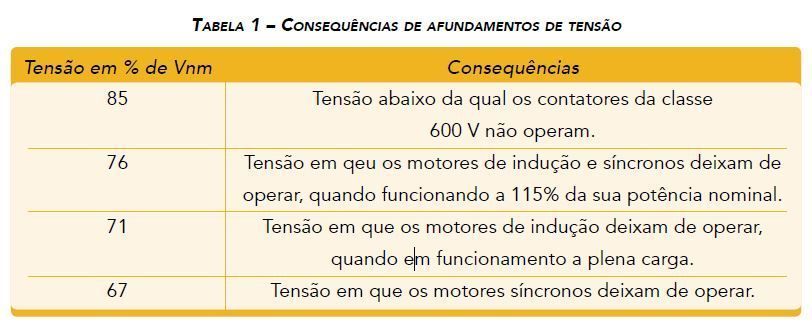
O afundamento de tensão nas partidas de motores de indução trifásicos sempre foi um problema para indústrias e distribuidoras. Provavelmente, o efeito de partida de motores mais amplamente conhecido e estudado é a queda de tensão experimentada por um sistema elétrico industrial como resultado da partida de grandes motores. Durante a partida, os motores elétricos solicitam da rede de alimentação uma corrente de valor elevado, da ordem de seis a dez vezes a sua corrente nominal. Nestas condições, o circuito, que, inicialmente fora projetado para transportar a potência requerida pelo motor, é solicitado agora pela corrente de acionamento durante um certo período de tempo. Em consequência, o sistema fica submetido a uma queda de tensão muito superior aos limites estabelecidos, podendo provocar sérios distúrbios operacionais nos equipamentos de comando e proteção, iluminação e no sistema elétrico de uma forma geral. A Tabela 1 fornece os valores percentuais de tensão sob os quais os motores e diversos dispositivos de comando podem operar indevidamente.
Existem diversos métodos e soluções para partida de motores de indução: partida direta, chave estrela-triângulo, partida por autotransformador, soft-starter, inversores de frequência, etc. No presente trabalho, de modo a analisar o pior caso em relação ao afundamento de tensão, será utilizada a condição de partida direta.
Afundamentos de tensão na partida de motor
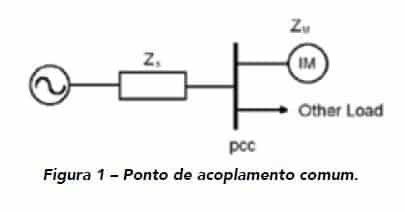
A corrente de partida ocorre porque o motor solicita da rede de seis a dez vezes a corrente usual para produzir o torque de partida. Afundamentos de tensão devido à partida de grandes motores podem ser teoricamente calculadas de maneira similar às causadas por faltas no sistema. A Figura 1 mostra o circuito equivalente para partida de motor em um ponto de acoplamento comum (point of common coupling) PCC. A tensão no PCC é dada pela equação 1:
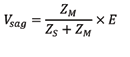
Em que ZM é a impedância do motor sob estudo e ZS é a impedância da fonte.
Estudo de caso
As simulações realizadas para o sistema elétrico do presente trabalho foram elaboradas no software PTW, da SKM Systems Analysis. O sistema elétrico em estudo é parte de uma subestação típica de uma unidade industrial.
A subestação recebe alimentação em 13,8 kV de uma concessionária fictícia por meio de dois ramais alimentadores no painel PN-01, o qual alimenta os painéis PN-02 e PN-03: um CCM de média tensão em 4,16 kV e um de baixa tensão em 480 V, respectivamente. A alimentação dos CCMs será feita através de dois ramais alimentadores, cada um contendo um transformador abaixador: TF-02A / TF-02B (4000 kVA – 13,8 kV / 4,16 kV) e TF-02A / TF-02B (630 kVA – 13,8 kV / 4,16 kV). Cada transformador é capaz de suportar toda a carga em operação do painel que alimenta.
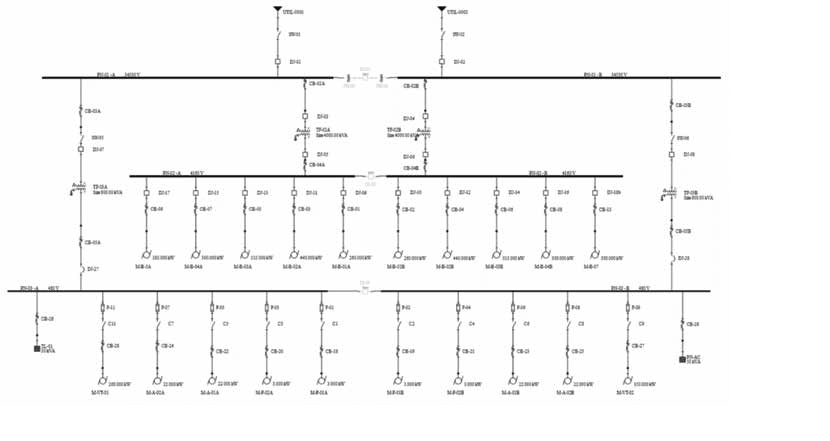
Figura 2 – Diagrama unifilar.
Premissas
Como já abordado, no instante do acionamento de um motor elétrico, é solicitada da rede uma corrente de alto valor, que proporciona um afundamento de tensão elevada no circuito alimentador. Este afundamento de tensão pode variar de acordo com as impedâncias do sistema, desde a fonte de suprimento até os terminais do motor.
O primeiro valor de interesse é da concessionária local, que, normalmente, limita a queda de tensão no ponto de entrega do sistema distribuidor. Geralmente, este valor fica limitado a 3% da tensão nominal primária. De forma a salientar esta recomendação, as referências [3] e [4] apresentam normas técnicas de fornecimento de energia primária de duas concessionárias, onde é imposto o limite de 3% da tensão nominal primária no ponto de entrega.
O segundo valor é de interesse do projetista na determinação da tensão mínima para funcionamento das cargas e acionamento dos contatores, tanto os do motor em questão como os das outras unidades em funcionamento [2]. A referência [5] utilizada no presente trabalho estabelece o limite de 15% de afundamento de tensão nas barras do sistema.
Análise estática
A análise estática compreende um estudo de fluxo de potência considerando os maiores motores na condição de partida e os demais na condição em regime. Foram realizados quatro casos de simulações de fluxo de potência na plataforma PTW:
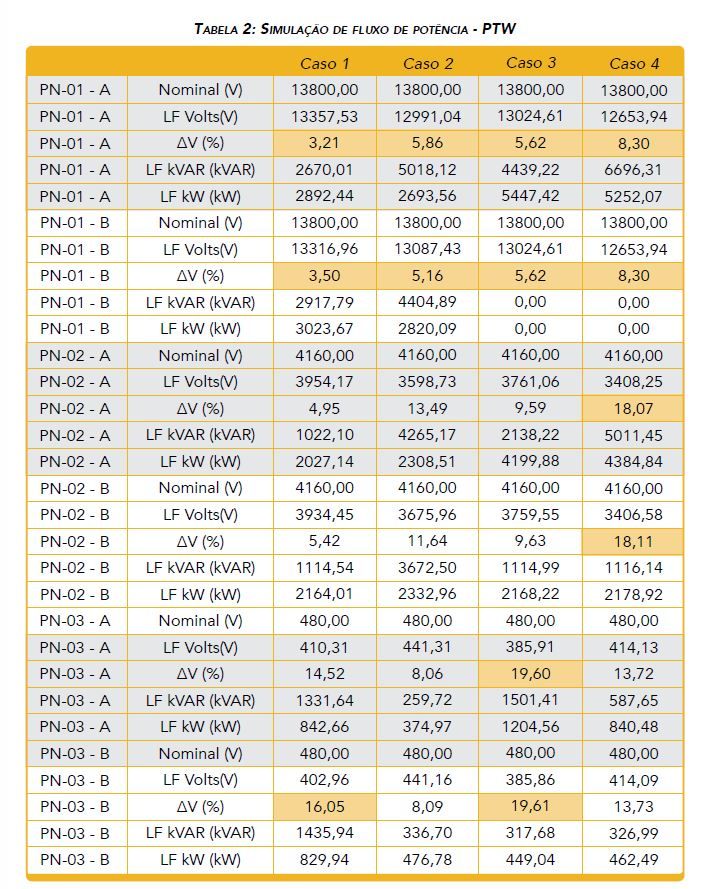
Os resultados para os quatro casos simulados foram resumidos na Tabela 2, que apresenta para cada barra do sistema industrial: a tensão, a queda de tensão percentual e os fluxos de potência ativa e reativa. Atenção especial pode ser dada ao afundamento de tensão percentual nas barras (ΔV %). Observando a tabela, nota-se que a barra da concessionária (PN-01) apresentou afundamentos de tensão acima do limite de 3% para todos os casos. O CCM de 480 V (PN-03) e o de 4,16 kV (PN-02) apresentaram afundamentos de tensão acima do limite de 15% nos casos 1, 3 e 4.
Análise dinâmica
Nesta seção, serão apresentadas simulações no tempo do comportamento das tensões e de algumas características motoras obtidas, a partir do módulo Transient Motor Starting do PTW. Estas simulações foram realizadas para o caso 3, pois foi o cenário que apresentou os piores resultados em relação ao atendimento dos limites de perfil de tensões. Serão apresentados os gráficos referentes às simulações e os comentários relativos às figuras.
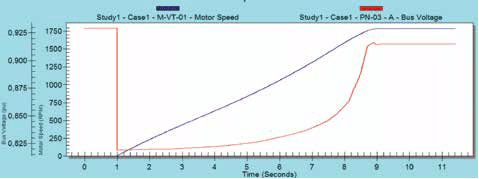
Figura 3 – Tensão em PN-03 e velocidade de M-B-03ª.
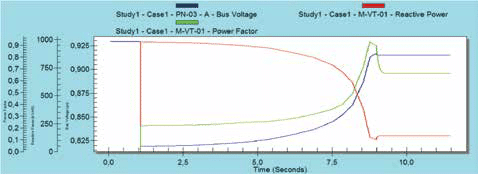
Figura 4 – Tensão em PN-03, fator de potência e potência reativa M-VT-01.
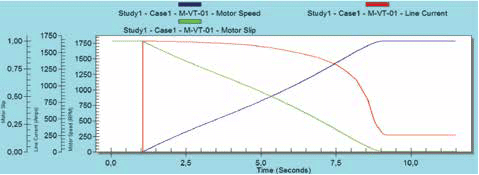
Figura 5 – Velocidade, corrente na linha e escorregamento M-VT-01.
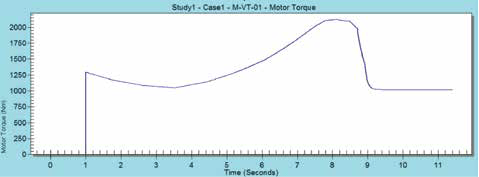
Figura 6 – Torque M-VT-01 .
1 – A Figura 3 ilustra a tensão na barra do CCM de 480 V (PN-03) para a simulação do caso 3. No instante da partida, a tensão afunda para 0,8 pu, não respeitando o limite de 15%. À medida que o motor alcança sua velocidade nominal (1800 rpm), a tensão na barra se restabelece.
2 – A Figura 4 ilustra a tensão no CCM de 480 V (PN-03), o fator de potência e a potência reativa no motor M-VT-01 (260 kW) para a simulação do caso 3. No instante da partida, o fator de potência é baixo, consumindo da rede quase que somente potência reativa. Nota-se, portanto, que o afundamento de tensão está ligado ao consumo de potência reativa.
3 – A Figura 5 ilustra a corrente na linha, a velocidade e o escorregamento do motor. A corrente no momento da partida é aproximadamente seis vezes a corrente nominal. À medida que a velocidade do motor aumenta, a corrente na linha diminui e atinge seu valor nominal quando o motor atinge sua velocidade nominal. A sobrecorrente de partida, portanto, se sustenta enquanto o motor acelera, só caindo aos níveis normais quando o motor se aproxima da velocidade de regime. O escorregamento antes do instante de partida tem valor 1, pois o rotor está parado. Seu valor decai até próximo de zero quando é atingida a velocidade nominal. Nota-se que a velocidade do motor e o escorregamento assumem variações aproximadamente lineares em direções opostas desde o instante da partida até o funcionamento em regime.
4 – A Figura 6 ilustra o torque do motor. O torque operativo apresenta valor um pouco abaixo do torque de partida. Como o torque do motor de indução varia aproximadamente com o quadrado da tensão aplicada aos seus terminais um elevado afundamento de tensão nos terminais do motor pode fazer com que o motor não consiga partir.
Conclusões
Por meio da análise de partida de motores, para as diversas condições operativas, foi possível prever o dimensionamento de um sistema que não operaria dentro de limiteis aceitáveis de tensão, fato que comprometeria seu correto funcionamento. Os resultados obtidos das simulações mostraram que a condição de contingência se apresentou como o pior cenário, principalmente na baixa tensão (480 V). Foi também analisada a ligação entre o afundamento da tensão e o consumo de potência reativa para controle da mesma.
Pode-se concluir que, em uma rede incapaz de fornecer potência reativa necessária, a tensão cairia até não se recuperar mais. Análises considerando outros métodos de partida, comparando-se as vantagens e desvantagens técnicas e econômicas, podem ser realizadas como trabalhos futuros.
Por final, foi possível observar a importância de uma instalação industrial que garanta a qualidade dos processos e da energia elétrica. Se forem comparados os custos da perda da operação por indisponibilidade de energia versus o custo investido na infraestrutura do sistema elétrico, o custo do projeto elétrico apresenta valor desprezível quando visto pelos onerosos prejuízos associados a uma possível parada da planta.
Referências bibliográficas
[1] ABBAS, M.; MAJEED, M.A.A.; KASSAS, M.; AHMAD, F.; Motor starting study for a urea manufacturing plant, IEEE Power Engineering, Energy and Electrical Drives (POWERENG), 2011 International Conference on, 2011;
[2] MAMEDE FILHO, João. Manual de Equipamentos Elétricos, 3. ed. Rio de Janeiro, LTC – Livros Técnicos e Científicos Editora S.A, 2005;
[3] COELCE; NT-002/2011: Fornecimento de Energia Elétrica em Tensão Primária de Distribuição, 2011;
[4] CEB; NTD – 6.05: Fornecimento de Energia Elétrica em Tensão Primária de Distribuição, 2013;
[5] Motors and Generators Standard MG1–2003, NEMA, 2004.
*Por Paulo Victor de Souza Borges e Cristiano Santos Carvalho



3 respostas
Boa noite , gostaria de saber qual o tempo máximo de quesade tensão que um motor suporta
Muito bom o conteúdo. Sempre tive algumas dúvidas sobre este assunto e aqui consegui obter esclarecimento.
liguei um motor mono de um aparador de gramas,estava funcionando normal,desmontei pra pintar,montei novamente e esta funcionando normal,porem percebi q esta rodandado mais lento e qdo acionado esta dando um piqui de energia,o q pode ser,e o q fazer