Edição 102 – Julho de 2014
Por José Starosta
Partidas de motores
As correntes de partida em motores de corrente alternada são uma das mais “combatidas” no cotidiano das grandes instalações e, historicamente, a tecnologia tem auxiliado no tratamento deste assunto. A razão principal é a importância direta destas correntes na qualidade da energia e nos afundamentos de tensão relativos. O principal ponto de consideração no tema é a limitação desta corrente de partida dos motores de forma que a rede elétrica não “sofra” e suporte a solicitação da partida em todo seu regime até que se atinja o regime síncrono (operação estável) com a minimização dos afundamentos e transientes decorrentes destas partidas. Porém, enquanto determinada carga tenta partir, outras se encontram em operação na mesma rede e a partida desta carga não pode interferir na operação plena das outras.
Várias foram as soluções encontradas em corrente alternada para este fim em função da tecnologia disponível. Inicialmente foram considerados os dispositivos eletromecânicos, como chaves compensadoras, autotransformadores, chaves estrelas triângulo e outros dispositivos, que, por reduzirem a tensão na alimentação inicial, reduziam também as correntes de partida em valores consideráveis. Isso proporcionava menor impacto na qualidade da tensão, não só da carga que tentava partir, mas na operação normal de outras que já operavam no mesmo barramento, conforme já exposto anteriormente.
A fonte de alimentação sempre teve uma participação importante no processo da partida. Quanto mais alta (satisfatória) for a capacidade da potência de curto-circuito no barramento onde o motor está conectado, menores serão os problemas e as consequências das partidas dos motores. De uma forma geral, a relação entre a potência da fonte e potência do motor que se deseja partir é um primeiro indicativo do regime e da qualidade da partida esperada. Caso clássico são os motores que operam alimentados por duas fontes (rede e gerador) e que possuem bom comportamento quando operando pela rede (transformador) e pioram o desempenho quando partindo pelo gerador que normalmente possui potência de curto-circuito menor. A Figura 1 apresenta a partida direta de um motor e seu efeito na rede.
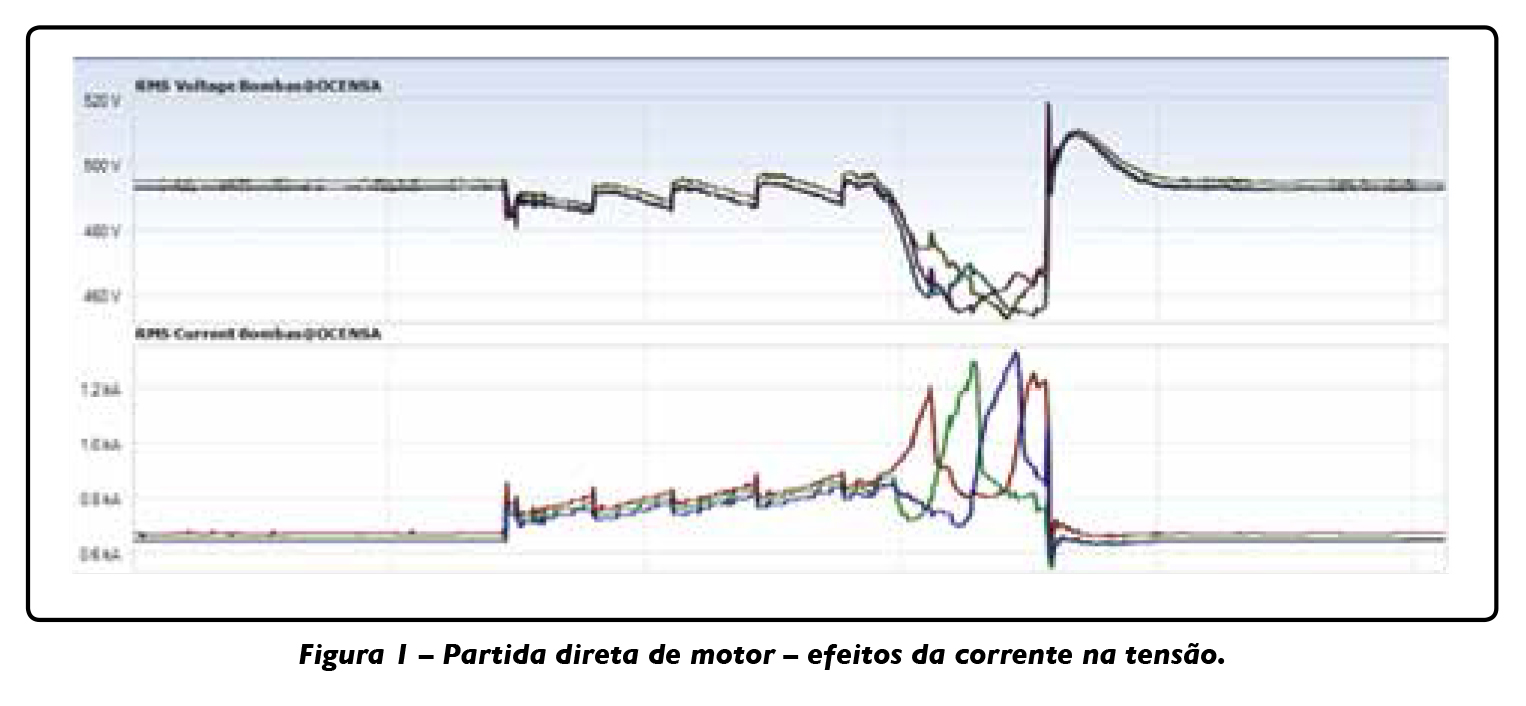
O que se observa na Figura 1 é o incremento da corrente de partida em mais de dez vezes, além de desequilíbrio da corrente de partida. Como consequência nota-se o afundamento de tensão de quase 10%, impedindo que a carga seja energizada e a partida abortada.
Durante as últimas décadas foram desenvolvidos os dispositivos eletrônicos de partida que substituíram parcela importante dos dispositivos eletromecânicos citados que se encontravam (e ainda estão) instalados e, principalmente, equiparam as novas instalações e sistemas com a principal vantagem de estarem integrados a eficientes sistemas de automação.
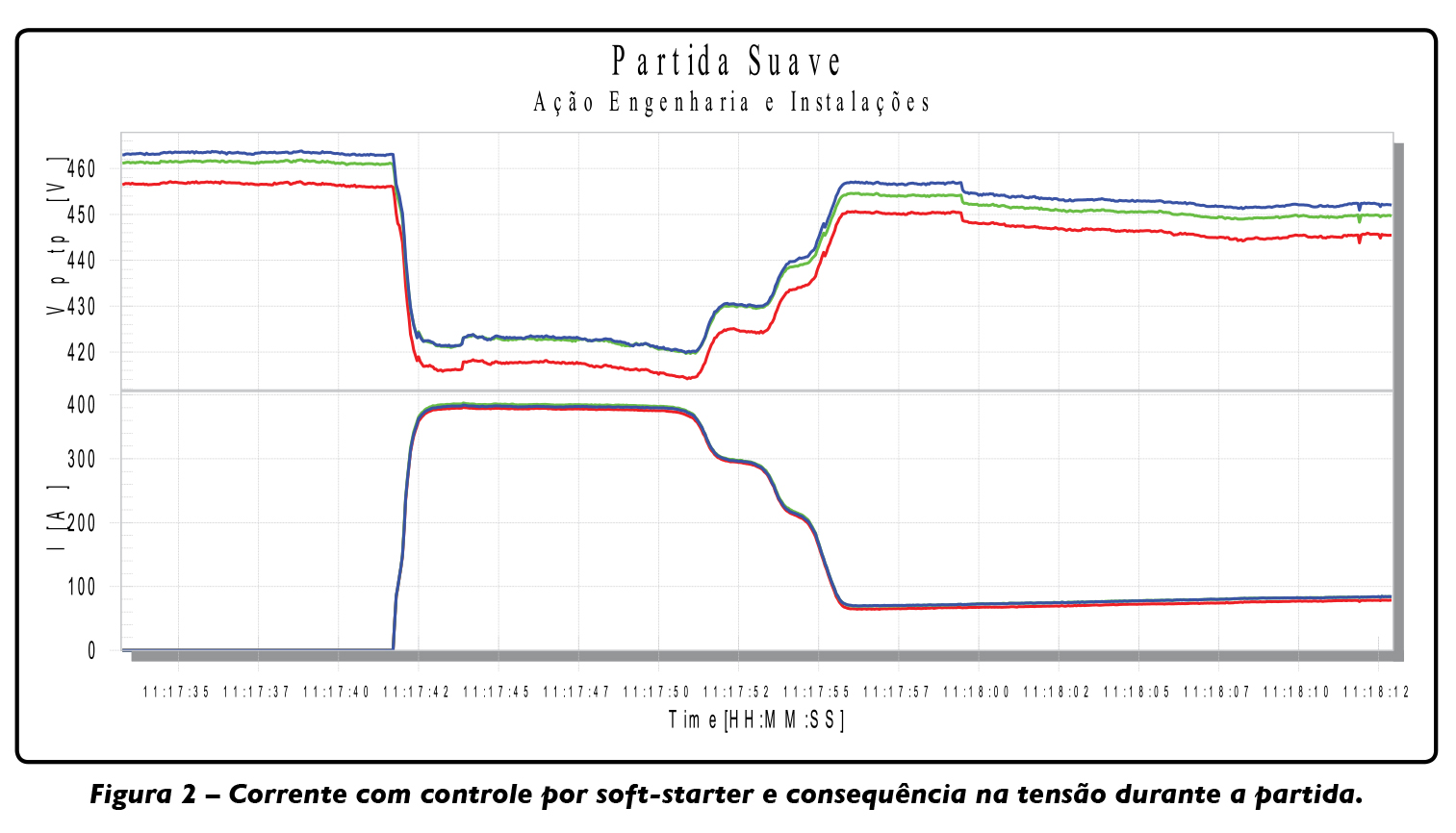
Os então “novos equipamentos”, conhecidos no mercado como dispositivos de partida suave ou “soft-starters”, evoluíram desde sua concepção e de uma forma geral controlam a alimentação do motor durante os ciclos de partida, de forma que o incremento da corrente a cada ciclo (ou combinação) permita uma partida sem impactos na rede em que o motor está conectado. Outras variáveis devem ser consideradas neste controle, como o torque necessário para a partida, o que impossibilita, na maior parte dos casos, uma partida totalmente linear. Estes equipamentos possuem os ajustes necessários para a maximização da performance em função das variáveis envolvidas. A Figura 2 apresenta a partida de outro motor acionado por “soft-starter”.
O que se pode considerar uma evolução dos “soft-starters” são os inversores de frequência, cujo principal objetivo não é exatamente efetuar a partida dos motores, mas sim controlar sua velocidade em regime de operação normal. A variação de velocidade por meio da variação digital da frequência, além de ser uma excepcional ferramenta de ganhos com eficiência energética e automação dos processos, pode também operar como eficientes “partidores” de motores, com resultados superiores aos dos “soft-starters” em função do maior número de recursos que o primeiro.
Apesar de todo o controle, pode-se observar na Figura 2 que, devido à necessidade do torque de partida, não se consegue linearizar a corrente de partida, o afundamento verificado na tensão de alimentação é apenas minimizado e não totalmente eliminado. No caso da Figura 2, a corrente de partida é da ordem de 4 a 5 vezes a corrente nominal, causando um afundamento de 8%.
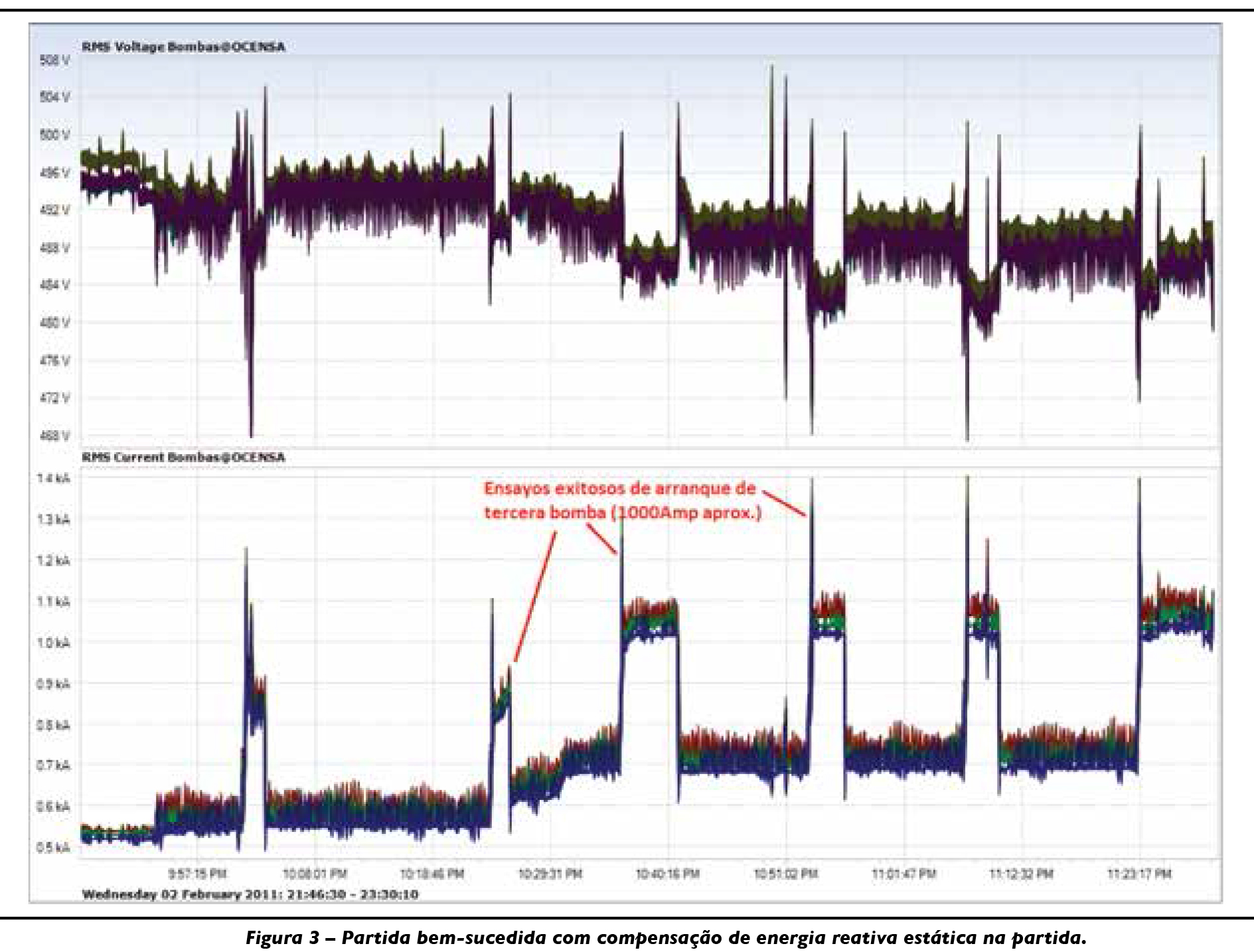
Outra possibilidade para minimização das correntes de partida é a injeção de potência reativa durante os primeiros ciclos de partida, reduzindo drasticamente a corrente de partida (que tem grande parcela de energia reativa), permitindo a manutenção da tensão da rede em níveis adequados. Esta discussão (compensação de afundamentos de tensão na partida de motores com uso de compensadores estáticos) foi o tema da edição de julho de 2011 e o gráfico da Figura 3 ilustra a situação da partida de grupo de motores com compensação reativa adequada durante a partida. Esta situação pode ainda ser encontrada em cargas localizadas distantes das fontes por questões operacionais é o caso de plataformas de petróleo, com fontes de baixa potência de curto (geradores) e bombas localizadas em distâncias consideráveis.
São várias as soluções e sua especificação deve considerar o estudo de todas as variáveis elétricas e operacionais envolvidas e não somente os custos aparentes destas possíveis soluções.
Continua na próxima edição.