Edição 115 – Agosto de 2015
Por Daniel Sampaio, Victor Gomes de Sousa, Daniel Rubbo, Alan Costa e Ruben Glatt*
Câmeras infravermelhas que originalmente foram desenvolvidas para uso militar durante a guerra da Coreia acharam rapidamente aplicação em segurança pública e depois migraram para uso comercial em diversas aplicações. Por meio desta tecnologia é possível detectar processos de falhas, gerados por anomalias térmicas, em estágios iniciais, em um dado componente de um equipamento elétrico ou mecânico, antes de interromper sua operação. Atualmente, devido ao seu processamento digital, câmeras termográficas permitem facilmente a aquisição, transmissão e pós-processamento de imagens infravermelhas de alta qualidade.
 Inspeções termográficas em sistemas elétricos identificam problemas causados por anomalias térmicas devido ao efeito joule. Pontos quentes em circuitos elétricos são geralmente causados pelo aumento da resistência ôhmica devido ao mau contato de componentes, corrosão ou oxidação de conexões, distribuição inadequada de carga ou falha no componente. Embora pareça um procedimento simples, a inspeção termográfica, tanto na aquisição das imagens quanto em sua análise, depende de conhecimento e avaliação de diversas influências inerentes ao processo ou inseridas nele. Essas influências podem estar relacionadas a qualificação do termografista, características da câmera termográfica, características do alvo da inspeção e condições ambientais nas quais a inspeção ocorre. Se as duas primeiras influências citadas forem controladas, os principais obstáculos em uma inspeção termográfica em um sistema elétrico serão emissividade, corrente de carga variável e condições ambientais (vento, umidade, temperatura radiação solar etc.).
Inspeções termográficas em sistemas elétricos identificam problemas causados por anomalias térmicas devido ao efeito joule. Pontos quentes em circuitos elétricos são geralmente causados pelo aumento da resistência ôhmica devido ao mau contato de componentes, corrosão ou oxidação de conexões, distribuição inadequada de carga ou falha no componente. Embora pareça um procedimento simples, a inspeção termográfica, tanto na aquisição das imagens quanto em sua análise, depende de conhecimento e avaliação de diversas influências inerentes ao processo ou inseridas nele. Essas influências podem estar relacionadas a qualificação do termografista, características da câmera termográfica, características do alvo da inspeção e condições ambientais nas quais a inspeção ocorre. Se as duas primeiras influências citadas forem controladas, os principais obstáculos em uma inspeção termográfica em um sistema elétrico serão emissividade, corrente de carga variável e condições ambientais (vento, umidade, temperatura radiação solar etc.).
Para a detecção automática de falhas foi desenvolvido um sistema de monitoramento que foi instalado em um computador servidor conectado à rede de dados da empresa. Este computador recebe imagens de uma câmera IP com visão noturna e de uma câmera termográfica, ambas instaladas em um suporte microcontrolado que possibilita movimento vertical e horizontal sobre o seu eixo fixo. Este sistema também tem acesso a alguns dados em tempo real, como potência ativa, corrente e tensão pela rede OPC da empresa. No suporte das câmeras está instalado um sensor para medir temperatura e umidade, sendo possível obter suas medições pela rede de dados. Estas informações são importantes para calibrar as imagens adquiridas pela câmera termográfica, com o intuito de se ter valores precisos de temperatura. O sistema desenvolvido analisa então regiões do sistema elétrico alvo, escolhido e configurado previamente, e produz um diagnóstico.
Aspectos gerais
É importante entender o processo de inspeção termográfica, suas características e limitações, além do processo de análise das imagens termográficas obtidas para se obter um diagnóstico correto. O trabalho de Epperly et al. mostra que um programa de inspeção termográfica usando equipamento adequado e pessoal treinado pode ser extremamente eficiente na prevenção de potenciais falhas em sistemas elétricos. É apresentada uma breve definição de termografia infravermelha, suas vantagens e limitações, critérios para seleção de uma câmera termográfica e diversos critérios e recomendações para determinar a urgência de reparo após a descoberta de um defeito por meio de uma inspeção termográfica. Já Madding e Lyon Jr. fazem uma revisão dos fatores de avaliação dos resultados obtidos usando termografia infravermelha, desde corrente de carga até elementos climáticos. O mesmo Lyon Jr., alguns anos depois, discute a relação entre a corrente e a temperatura de uma conexão falha, tanto quanto a resposta térmica como uma função da corrente da carga. Ele defende que processos de diagnóstico, com base apenas na medição da temperatura absoluta ou aumento de temperatura, correm o risco de resultar em diagnósticos errados. O trabalho de Madding, em 2002, aborda como a emissividade afeta a medição da temperatura e discute técnicas para a sua estimação. Madding propõe as manufaturas que seus equipamentos deveriam ser cobertos por materiais com alta emissividade e trazer informações em relação a assinatura térmica e modelo térmico sob todos os tipos de condições ambientais.
O trabalho de Ishino afirma que a termografia é comumente usada para inspecionar equipamentos de distribuição elétrica. O método proposto usa a câmera anexada a um cabo aéreo para capturar imagens de cadeia de isoladores no topo de linhas de transmissão ou distribuição. A princípio, alguém deveria extrair os isoladores da imagem capturada pela câmera. Como as temperaturas do suporte e do seu braço são uniformes, é possível subtraí-las da imagem original, deixando, em teoria, apenas objetos com uma temperatura mais alta que aquela, que são geralmente os objetos sob efeito de estudo.
Salem, Ibitayo e Geil apresentam uma metodologia para calibração de sistemas com base em câmeras infravermelhas para a caracterização de componentes eletrônicos de alta potência. Omar at al. mostra que autorreferência é uma técnica infravermelha, que elimina a necessidade de conhecimento prévio do local para uma detecção automática de defeitos em termogramas. Esta técnica consiste em dividir a imagem termográfica em pequenas vizinhanças [10]. O trabalho de Ng revisa o método de Otsu para selecionar limiares ideais para distribuição bimodais e unimodais [8]. Já o trabalho de Neto, Costa e Maia mostra os resultados obtidos a partir de testes projetados para avaliar a precisão da medição da temperatura de materiais submetidos a diferentes condições, usando uma câmera termográfica. Além disso, busca definir os valores mais apropriados de emissividade para materiais normalmente encontrados em um equipamento de uma subestação. Em geral, para a maioria dos materiais testados, os melhores valores de emissividade encontrados estavam na faixa de 0,85 a 0,95.
O trabalho de Oliveira propôs o uso da termografia para a previsão de manutenção de linhas de transmissão
de energia elétrica. Um tópico importante discutido é o processamento de imagem, em que são usados vários algoritmos conhecidos (Itada para segmentação de imagem e Otsu para seleção de limiares) a fim de achar pontos quentes na imagem. Foi realizada uma análise quantitativa e qualitativa dos pontos quentes usando lógica Fuzzy. O trabalho de Usamentiaga et al. mostra que a medição de temperatura baseada em radiação infravermelha depende da configuração correta da emissividade. Entretanto, a configuração da emissividade não é uma tarefa fácil, pois geralmente não é conhecida precisamente, é muito influenciada por efeitos de radiação e pode, inclusive, mudar de acordo com a temperatura.
Neste trabalho, por meio de uma sequência de imagens termográficas adquiridas de um sistema elétrico alvo, é desejado identificar suas falhas automaticamente, aplicando processamento de imagem e utilizando inteligência artificial por meio de redes neurais artificiais. Com o intuito de validar este trabalho, o sistema elétrico alvo escolhido foi a região de um transformador elevador localizado na área externa de uma pequena usina hidrelétrica cujos elementos a serem inspecionados são chaves seccionadoras, isoladores, para-raios, conexões na saída do transformador elevador e vários conectores que unem os cabos entre a saída do transformador elevador e a linha de transmissão.
O sistema de monitoramento desenvolvido
O sistema de monitoramento foi desenvolvido para identificação automática de falhas de um determinado sistema elétrico por intermédio de uma sequência de imagens termográficas. As partes do sistema de monitoramento são apresentadas na Figura 1.
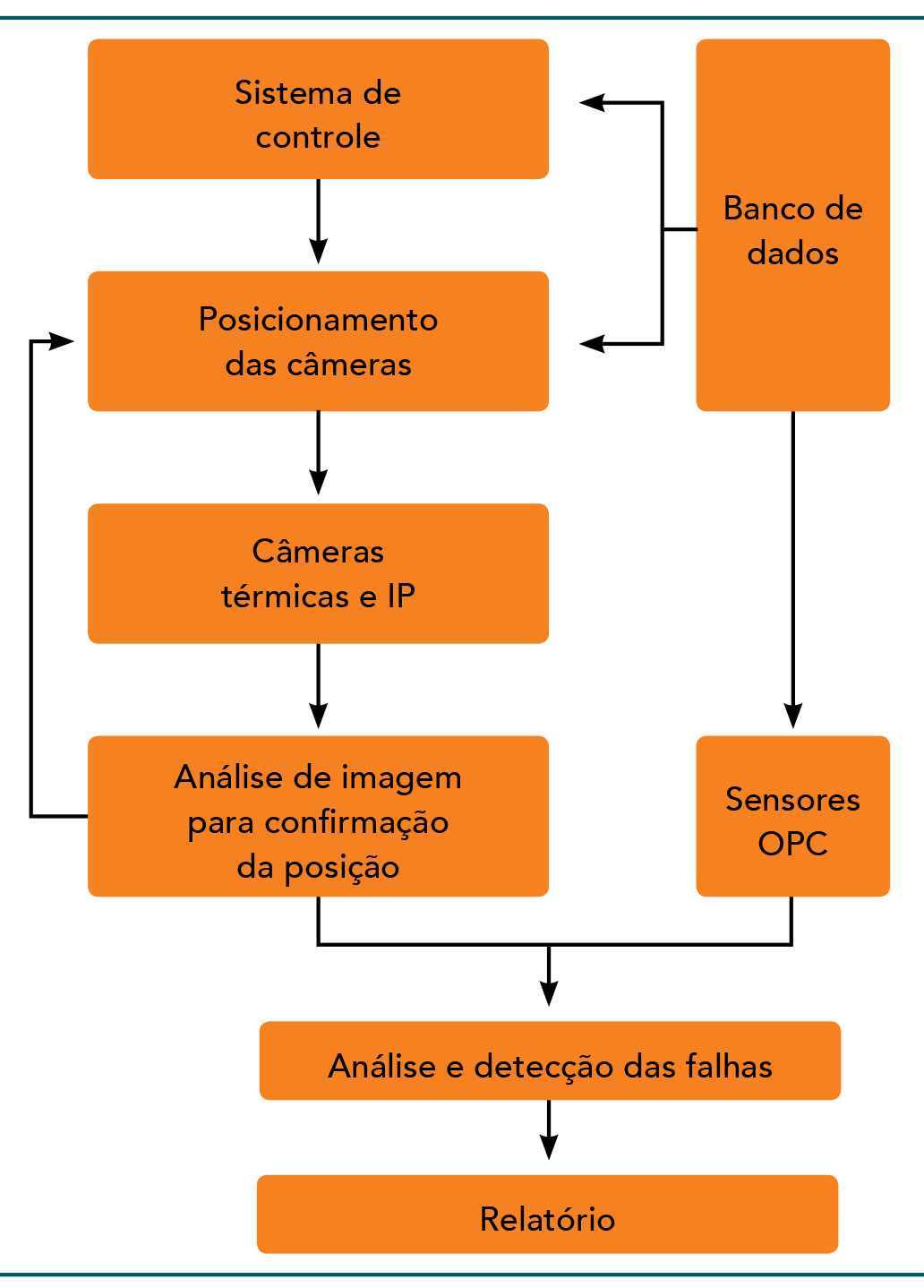
Figura 1 – Visão geral do sistema inteligente de monitoramento.
Os sensores e a rede OPC
A usina hidrelétrica tem diversos sensores instalados, usados para medir corrente, tensão, potência ativa, potência reativa e fator de potência da energia gerada. Estes sensores são conectados a uma rede OPC e por meio dela é possível obter valores instantâneos para estas variáveis. Estas medições são importantes para calibrar as informações obtidas das imagens adquiridas usando a câmera termográfica e a análise delas.
Câmeras e posicionamento das câmeras
Esta parte do sistema consiste em um suporte de câmera, mostrado na Figura 2, que é capaz de mover 180° na vertical e na horizontal sobre seu eixo. O movimento da câmera é realizado por meio de dois motores de passo que são controlados por um Arduino, que é uma plataforma eletrônica aberta de prototipagem composta por uma placa microcontrolada muito usada para automação doméstica. Existem duas câmeras, uma câmera IP com visão noturna e uma câmera infravermelha termográfica. Além disso, a temperatura e a umidade ao redor da câmera são monitoradas continuamente.

Figura 2 – Visão explodida do suporte com movimentação para as câmeras.
O controle das câmeras é integrado a uma interface de usuário na plataforma LabView, com controles para os motores e indicadores de temperatura e umidade. O programa se comunica com o Arduino usando uma conexão Ethernet. A fim de inspecionar todos os elementos desejados no sistema elétrico alvo, é necessário mover a câmeras para seis posições predeterminadas. As coordenadas destas posições são salvas em um banco de dados e internamente convertidas em passos para os motores de passo. Os motores de passo são usados devido à sua alta precisão no posicionamento. As imagens com os elementos alvo destas seis posições são mostradas nas Figuras 3 e 4, respectivamente, para a câmera IP com visão noturna e a câmera térmica infravermelha.

Figura 3 – Imagens das seis posições de interesse obtidas com a câmera IP com visão noturna.
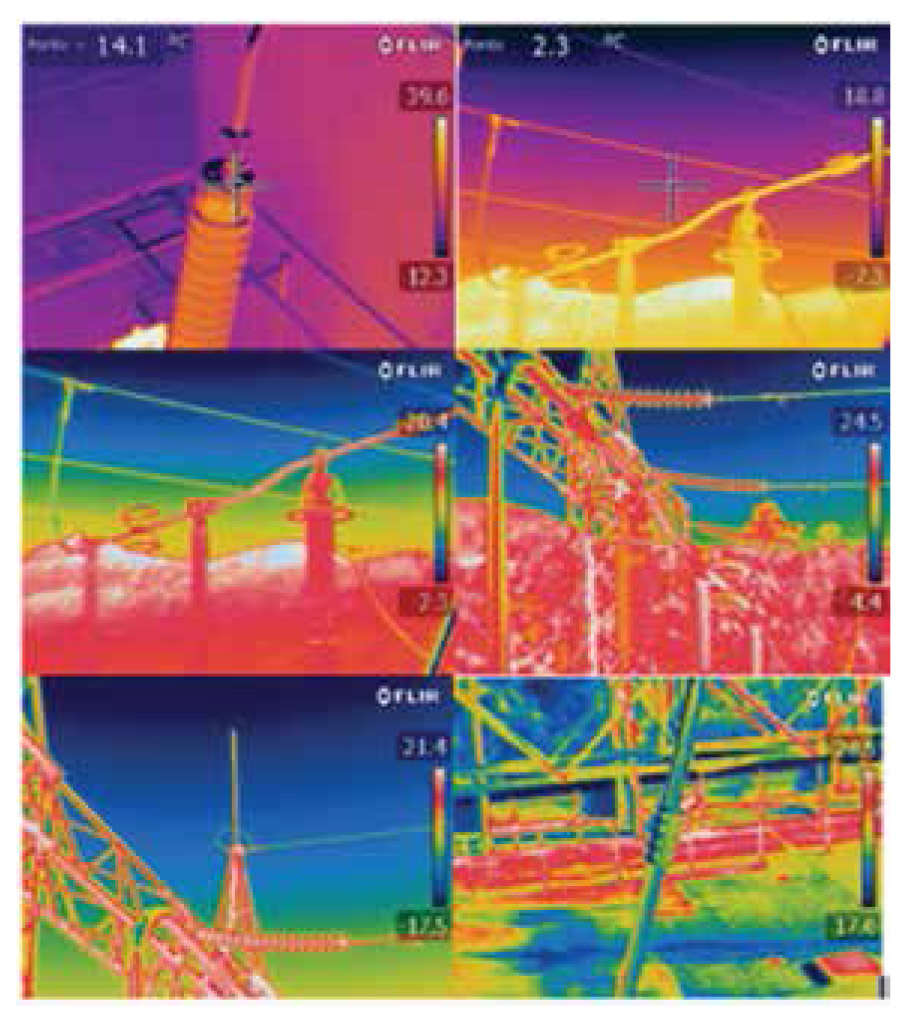
Figura 4 – Imagens das seis posições de interesse obtidas com a câmera termográfica infravermelha.
Confirmação de posicionamento
Comparando uma imagem préprocessada salva com uma imagem adquirida logo após o posicionamento da câmera, é possível verificar se o posicionamento foi efetuado com sucesso. Isto é necessário porque o sistema não consegue detectar falhas mecânicas no sistema de movimentação das câmeras.
Os contornos dos objetos nas imagens são obtidos usando um filtro padrão passa-alta tipo Sobel. Se algumas partes selecionadas da imagem pré-processada salva coincidem com as mesmas partes da imagem que foi recém-adquirida, isto significa que o posicionamento foi efetuado com sucesso. Caso contrário as câmeras são enviadas para a posição inicial, na qual um sensor de fim de curso é usado para calibrar e definir sua posição inicial.
Após a calibração, as câmeras são enviadas novamente para o ponto desejado e o posicionamento é novamente testado. Após três tentativas, se o posicionamento não funcionar, o sistema para e uma mensagem de erro é enviada para a equipe de manutenção. Depois de confirmado o posicionamento das câmeras, a imagem adquirida de ambas as câmeras e a informação instantânea dos sensores conectados na rede OPC são enviados para a análise e identificação de falhas.
Análise das medições e detecção de falhas
Cada posição de interesse tem uma imagem processada salva previamente em um banco de dados. Para cada posição, a região de cada elemento de interesse é marcada utilizando um programa qualquer de edição de imagens. Depois esta região é isolada e uma imagem contendo todos os pixels pertencentes a cada elemento de interesse é criada e salva. Um exemplo desta sequência de processamento para isolamento da região de cada objeto de interesse é mostrado na Figura 5.

Figura 5 – Exemplo da sequência de processamento para isolamento da região de cada objeto de interesse.
As imagens dos elementos de interesse de cada uma das seis posições são mostradas na Figura 6.

Figura 6 – Imagens pré-processadas com os elementos de interesse de cada uma das seis posições.
Todos os valores de temperatura são lidos nas novas imagens adquiridas para cada região. Usando as informações de temperatura e umidade do sensor presente no suporte das câmeras, os valores de temperatura são corrigidos e salvos. A temperatura média, a temperatura máxima, a temperatura mínima e a temperatura mediana de cada região são salvas junto aos valores de corrente, potência ativa, potência reativa e fator de potência. Primeiro, uma rede neural artificial (RNA) foi treinada e validada para cada região usando um conjunto de cinquenta imagens com os respectivos dados de sensores.
A RNA possui a seguinte topologia: cinco neurônios para a camada de entrada, cinco neurônios na camada intermediária e um neurônio na camada de saída. As cinco variáveis submetidas à camada de entrada são: temperatura medida pelo sensor na câmera, umidade medida pelo sensor na câmera, corrente, potência ativa e potência reativa. A camada de saída está relacionada à temperatura média estimada para aquela região, de acordo com as condições submetidas. O valor de saída da RNA é então comparado com o valor da temperatura média obtida na região da imagem. Se a diferença for maior que a tolerância (neste trabalho foi usado 15%), uma mensagem de alerta é gerada. A temperatura máxima é também comparada com a temperatura máxima permitida para o material da região analisada e se for maior que o máximo aceito, um aviso de falha é emitido imediatamente.
Todos os valores são salvos em um banco de dados e uma tabela com a temperatura em cada região é atualizada. Se a região com a mensagem de alerta persistir depois de três inspeções seguidas, um aviso de falha e um diagnóstico baseado na diferença entre o valor esperado e o valor medido são gerados.
O diagnóstico também é gerado comparando imagens diferentes. Por exemplo, as chaves seccionadoras são instaladas em três diferentes fases do sistema elétrico. Uma vez que o sistema é submetido às mesmas condições e o equipamento tem as mesmas especificações, a diferença de temperatura entre estas regiões deve ser pequena. Se a diferença de temperatura entre estas regiões for maior do que 10%, um diagnóstico de falha também é gerado.
Banco de dados e controle
Para este projeto foi usado um banco de dados em MySQL uma vez que é um programa de banco de dados livre. No banco de dados são armazenados os dados adquiridos da rede OPC, as imagens obtidas com as câmeras e as imagens processadas (para as imagens apenas os endereços necessários para acessá-las que é salvo) e os pesos sinápticos da RNA treinada e validada para cada região. Portanto, o banco de dados possui todas as informações necessárias para o diagnóstico e também as informações geradas pelo diagnóstico. As informações são salvas cronologicamente.
No banco de dados também é possível encontrar uma agenda do sistema, definindo cada momento em que os elementos de interesse do sistema devem ser inspecionados. O controle das atividades é feito por meio da plataforma LabView.
Conclusão e trabalho futuro
O sistema desenvolvido analisa regiões do sistema elétrico alvo, definido e configurado previamente, e produz um diagnóstico. O sistema permite também que um termografista realize inspeções personalizadas dentro do campo de visão das câmeras de maneira remota, uma vez que o sistema pode ser acessado remotamente e ser operado no modo manual. Isso torna o sistema atrativo para inspeção em áreas de difícil acesso, instalações em áreas perigosas ou instalações remotamente operadas, uma vez que o termografista não precisa estar presente, sendo capaz de acessar as câmeras remotamente por uma conexão de internet ou conectado à rede da empresa.
O sistema ainda está sendo implantado e em fase de aprimoramento, porém com os resultados obtidos até agora é possível dizer que os objetivos deste trabalho foram alcançados. Os próximos passos deste trabalho são o desenvolvimento de uma correção digital de imagem para pequenos desvios no posicionamento da câmera e um relatório de inspeção termográfica completamente automático baseado em padrões nacionais e internacionais.
Agradecimentos
Os autores agradecem a atenção e a ajuda dos funcionários da empresa Ceran envolvidos em qualquer atividade relacionada a este trabalho.
Referências
*Daniel Julien Barros da Silva Sampaio é engenheiro eletricista, com mestrado em Engenharia Mecânica e Doutorado em Engenharia Mecatrônica. Atualmente, é Professor Doutor no Departamento de Engenharia Elétrica da Faculdade de Engenharia de Guaratinguetá – Unesp.
Ruben Glatt é engenheiro mecatrônico, com mestrado em Engenharia Mecânica. Atualmente, é doutorando no Departamento de Engenharia Elétrica da Escola Politécnica da USP.
Victor Gomes Soares de Souza é engenheiro eletricista. Atualmente, exerce o cargo de engenheiro de projetos na iniciativa privada.
Daniel Rubbo é engenheiro eletricista e engenheiro eletrônico na iniciativa privada. Alan Porto Costa possui graduação em Gestão da Tecnologia da Informação e atua como web designer.