Edição 101 – Junho de 2014
Por Hildo Guillardi, Paulo Serni, Danilo Brandão, Fernando Marafão, Luis de Pádua, Rafael Pazi e Flávio Gonçalves*
Uma revisão sobre aspectos construtivos e técnicas de controle do estágio de saída.
A produção industrial de fontes ininterruptas de energia (UPS – Uninterruptible Power System) iniciou-se na década de 1970, pela necessidade de fornecimento contínuo de energia para grandes sistemas de informática. No entanto, com a expansão do uso de novas tecnologias eletrônicas em todos os segmentos da sociedade, resultando em um aumento expressivo no número de aplicações com cargas sensíveis, o fornecimento de energia de boa qualidade e contínua tornou-se primordial, expandindo o mercado dos UPSs.
Topologias de construção de um UPS
A capacidade de comutação entre a fonte principal de energia e a secundária (baterias) garante várias características inerentes à qualidade da energia elétrica, portanto, um UPS possui várias classificações de acordo com sua topologia de construção e tempo de comutação.
Segundo a norma brasileira ABNT NBR 15014 e a internacional IEC62040-3, os UPSs são separados em três topologias quanto a sua operação e, principalmente, quanto ao fornecimento de energia à carga. No primeiro tipo, denominado online, a amplitude e a frequência da tensão apresentadas à carga são completamente independentes da rede principal e o circuito inversor do UPS é responsável pelo fornecimento de energia à carga durante toda sua operação. Nesse sistema é tipicamente empregada a topologia de dupla conversão, apresentada na Figura 1. A vantagem dessa topologia é a inexistência de tempo de comutação entre as duas fontes (rede elétrica e bateria), entretanto, apresenta um menor rendimento em função das perdas constantes de chaveamento nos semicondutores.
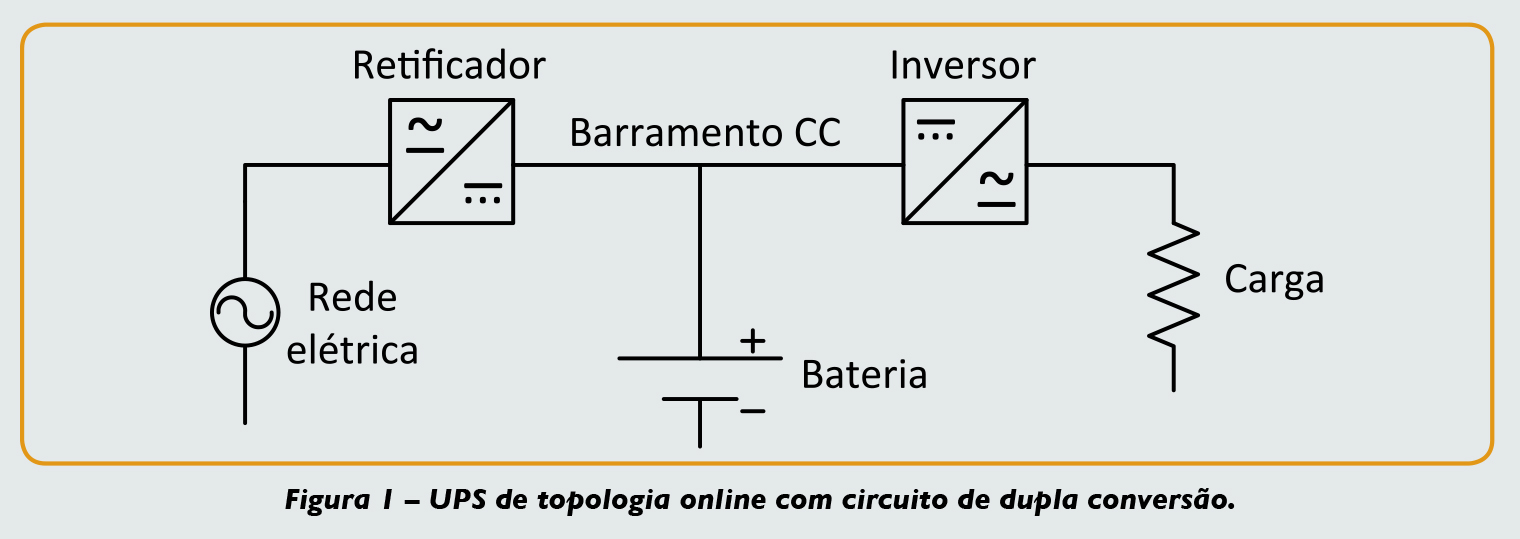
Devido ao desacoplamento entre as formas de onda das tensões da carga e da rede, não há a necessidade de algoritmos de sincronismo da saída da UPS com a rede principal. A inexistência desses algoritmos diminui a complexidade do controle. O desacoplamento, por sua vez, garante a possibilidade de compensação, para a carga, da maioria dos distúrbios ocorridos na rede elétrica principal.
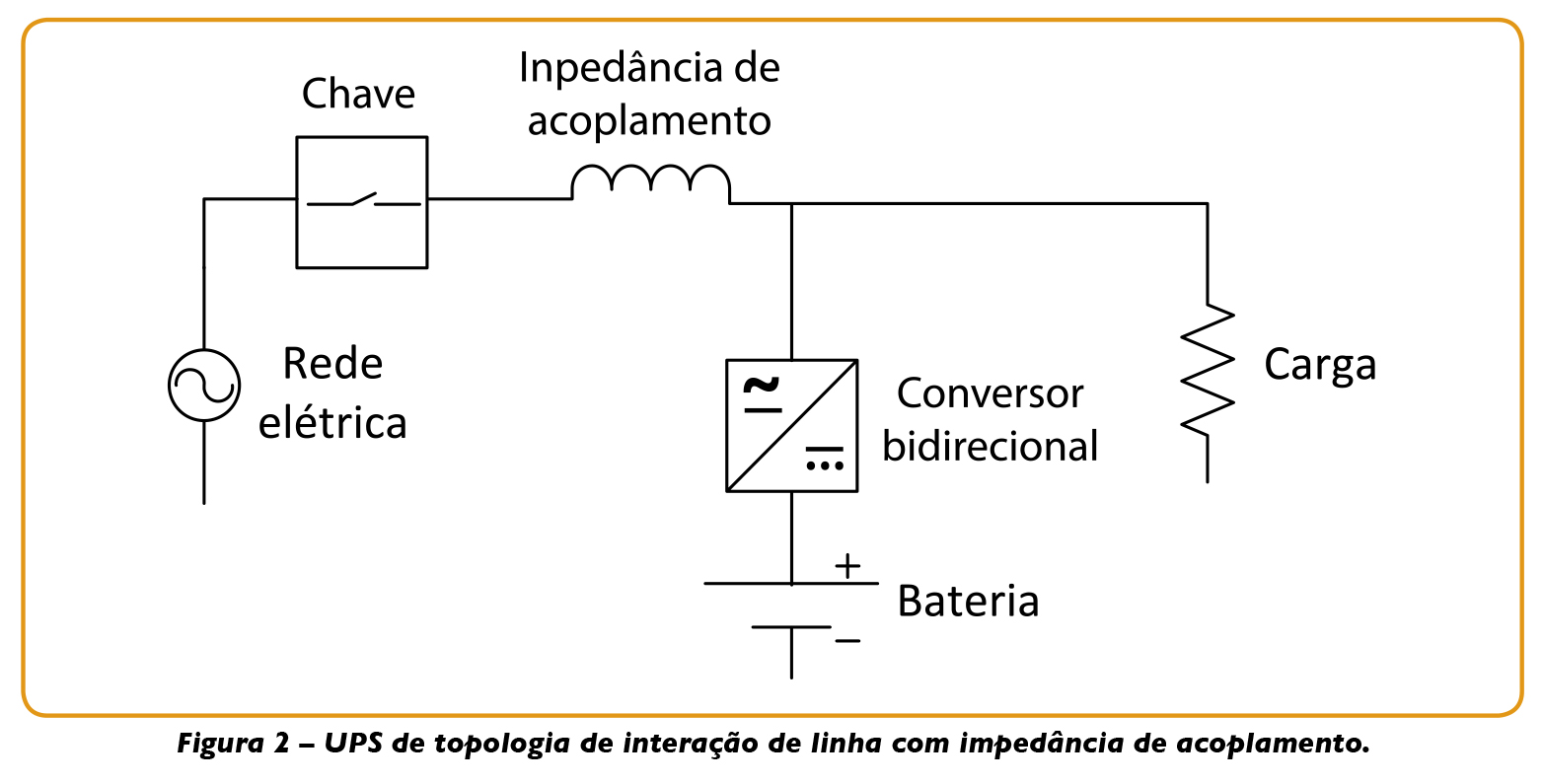
A segunda topologia utilizada é chamada interativa ou de interação com a rede (line interactive). Sua principal característica é que a frequência da tensão apresentada à carga depende completamente da rede (ao contrário da topologia online), portanto, essa topologia necessita de algoritmos de sincronismo do circuito do inversor com a rede elétrica. Contudo, a amplitude da saída não é totalmente dependente do valor da amplitude da tensão da rede, o que proporciona a capacidade de essa topologia atuar como compensador para distúrbios relacionados com a magnitude da tensão da rede. Entretanto, pode apresentar um tempo considerável de comutação entre as duas fontes, não conseguindo compensar todos os tipos de falta do sistema primário (Tabela 1). Na Figura 2 é mostrado o circuito de acoplamento por meio de uma impedância, sendo também possível o acoplamento por um transformador.
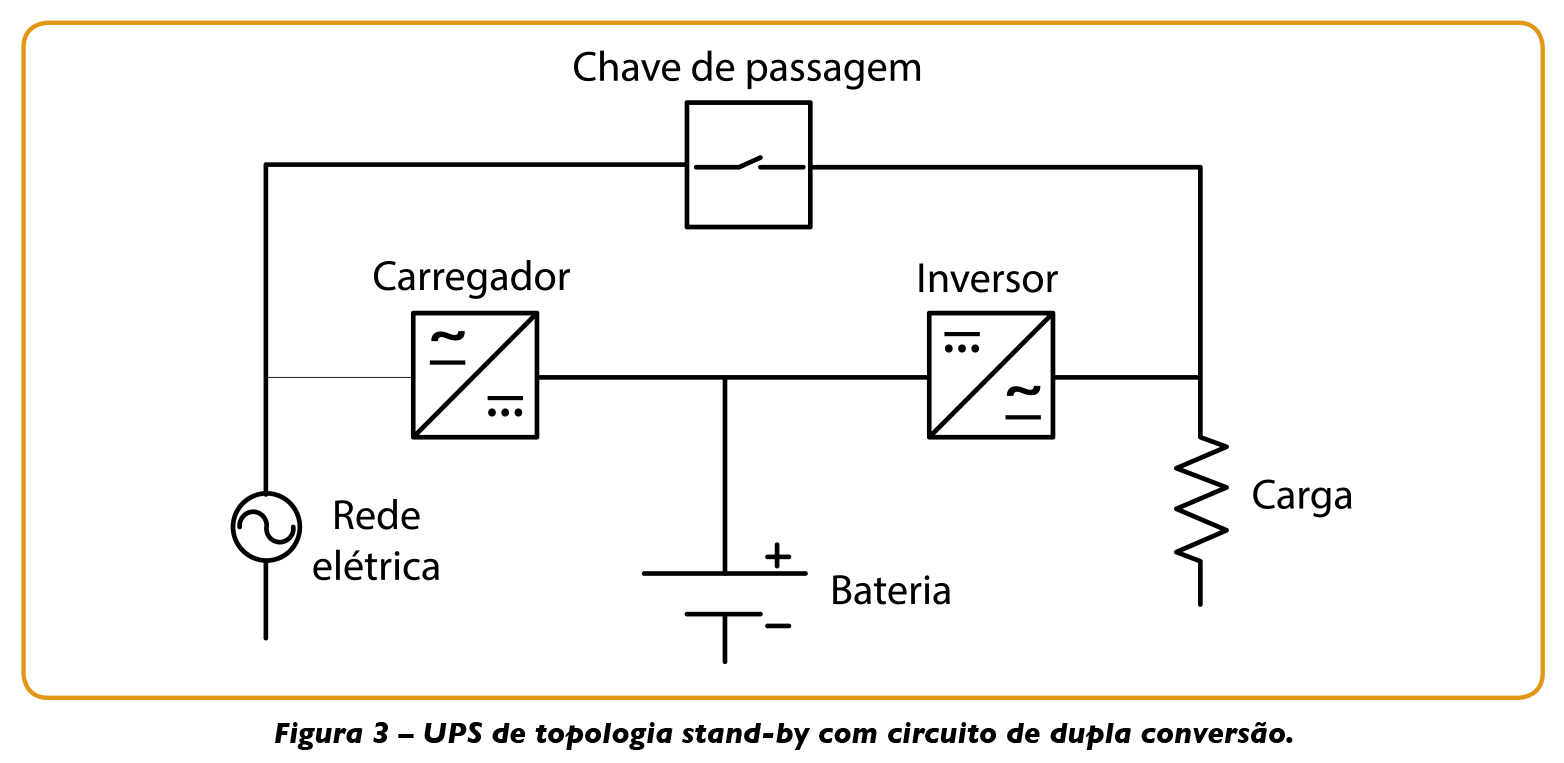
A última topologia é chamada stand-by, também conhecida em algumas literaturas como off-line, a qual é fundamentada no princípio de deixar o inversor em modo de controle fonte de tensão pronto para entrar em funcionamento na ausência da rede principal.
Quando operando no modo de alimentação da carga pela rede elétrica, tanto a tensão como a frequência dependem da rede, e o UPS pode se encontrar no modo de recarga da bateria. Quando operando no modo de alimentação pela bateria, o valor de tensão e de frequência apresentados à carga não dependem mais da rede, entretanto, o uso de algoritmos de sincronismo (fazendo com que a magnitude, frequência e fase da rede elétrica sejam mantidas na saída) possibilita uma rápida comutação entre as duas fontes. A topologia stand-by tipicamente utiliza o circuito de dupla conversão com uma chave de by-pass (Figura 3), o que permite a alimentação da carga sem a operação do circuito inversor que compõem a UPS.
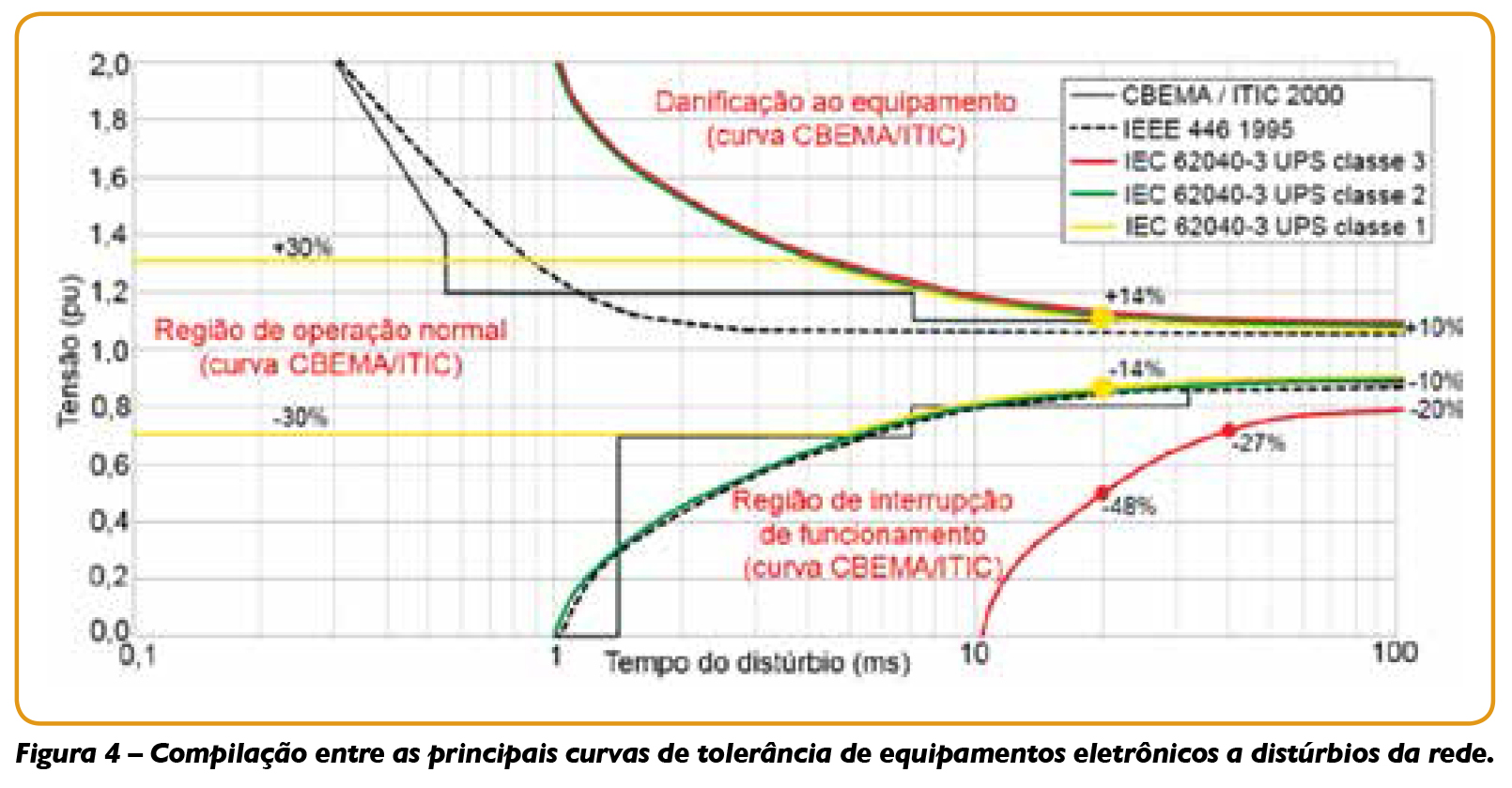
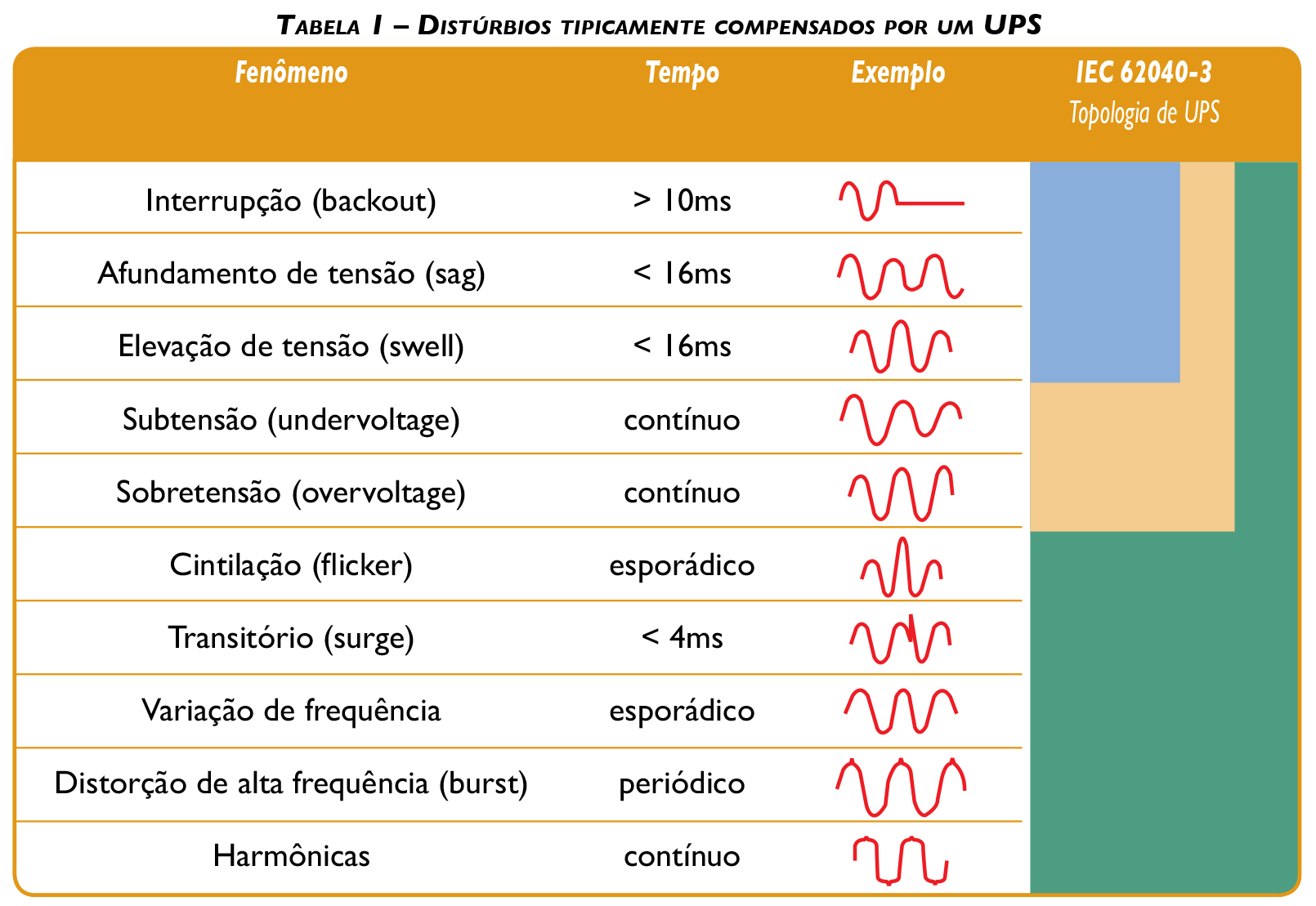
Dentro da possibilidade de um UPS atuar como um compensador para faltas no sistema elétrico, deve-se destacar que o distúrbio a ser compensado depende não só do algoritmo usado, mas também da topologia construtiva da UPS. A Tabela 1 mostra os tipos de distúrbios de Qualidade de Energia Elétrica (QEE) que cada topologia de UPS pode ser capaz de compensar. A operação de comutação entre a rede elétrica e a bateria, bem como a resposta transitória à inserção e à remoção de cargas classificam um UPS de acordo com as curvas da norma IEC 62040-3, a qual apresenta o tempo e o nível de resposta da saída para cada classificação, de forma que a carga (ou processo) sensível não sofra nenhum dano. A Figura 4 apresenta essas curvas em sobreposição com a CBEMA/ITIC e IEE Std. 446, as quais mostram a tolerância de equipamentos eletrônicos a ocorrências de falta da rede, reforçando que um UPS deve ser capaz de manter em funcionamento ininterrupto os equipamentos para os quais está fornecendo energia elétrica.
Como visto na Figura 4, existem três classificações de UPSs de acordo com sua resposta aos transitórios (de inserção e remoção de carga e com a comutação da fonte). Essa classificação vai da classe 1 (mais rígido), aceitando uma variação máxima de 30% na tensão de saída por um curto período de tempo, até a classe 3, que permite uma interrupção de até 10 ms no fornecimento.
Aspectos construtivos
Independentemente da topologia utilizada na impleme
ntação, o UPS deve conter um circuito inversor de saída, podendo ainda possuir um circuito elevador de tensão contínua (boost) e/ou um transformador para adequar os níveis de tensão (Figura 5) e fornecer isolamento galvânico ao sistema.
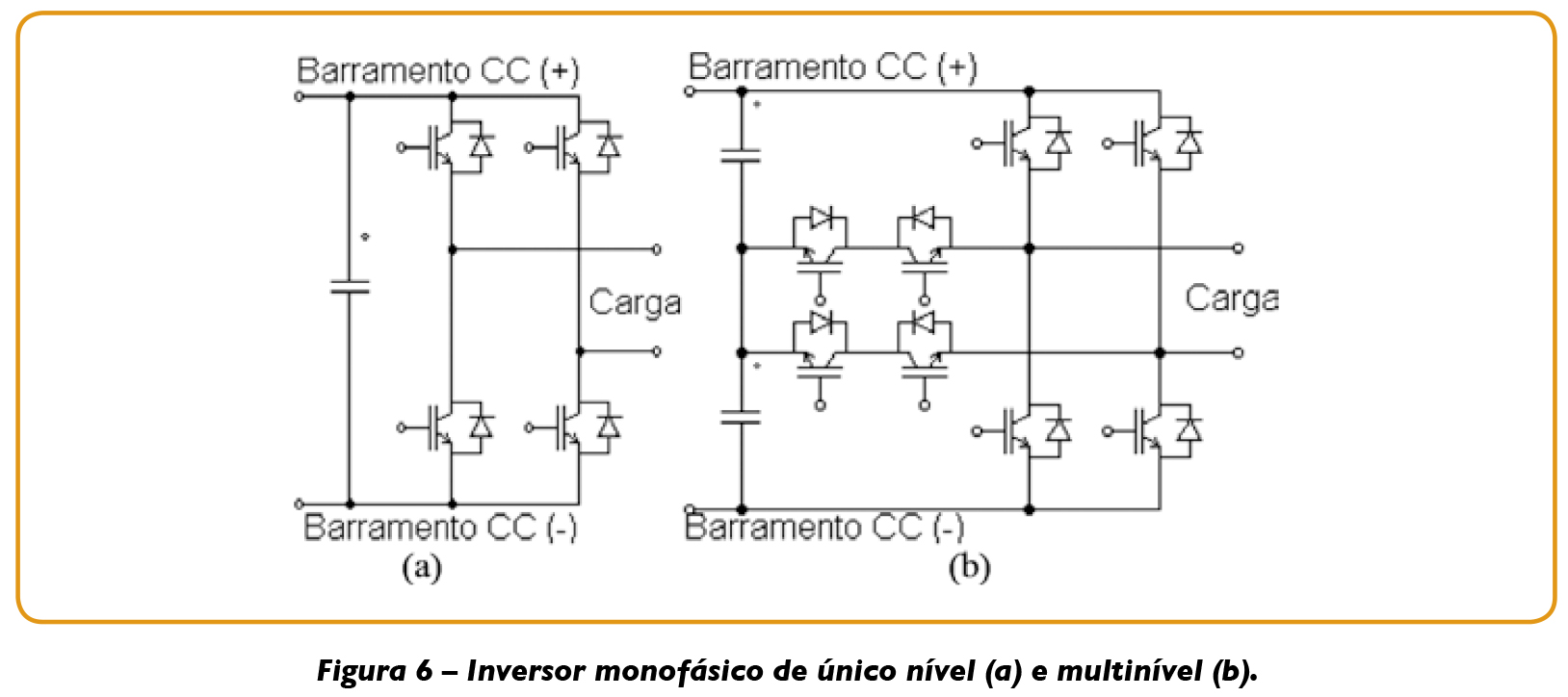
Ainda sobre o inversor de saída, podem-se utilizar diferentes topologias em sua construção, desde a mais simples até topologias complexas, como a multinível mostrada na Figura 6.
Topologias multiníveis diminuem o conteúdo harmônico da tensão de saída, os esforços de chaveamento e as perdas de comutação dos semicondutores de potência; porém, aumentam a complexidade dos algoritmos de controle e modulação PWM.
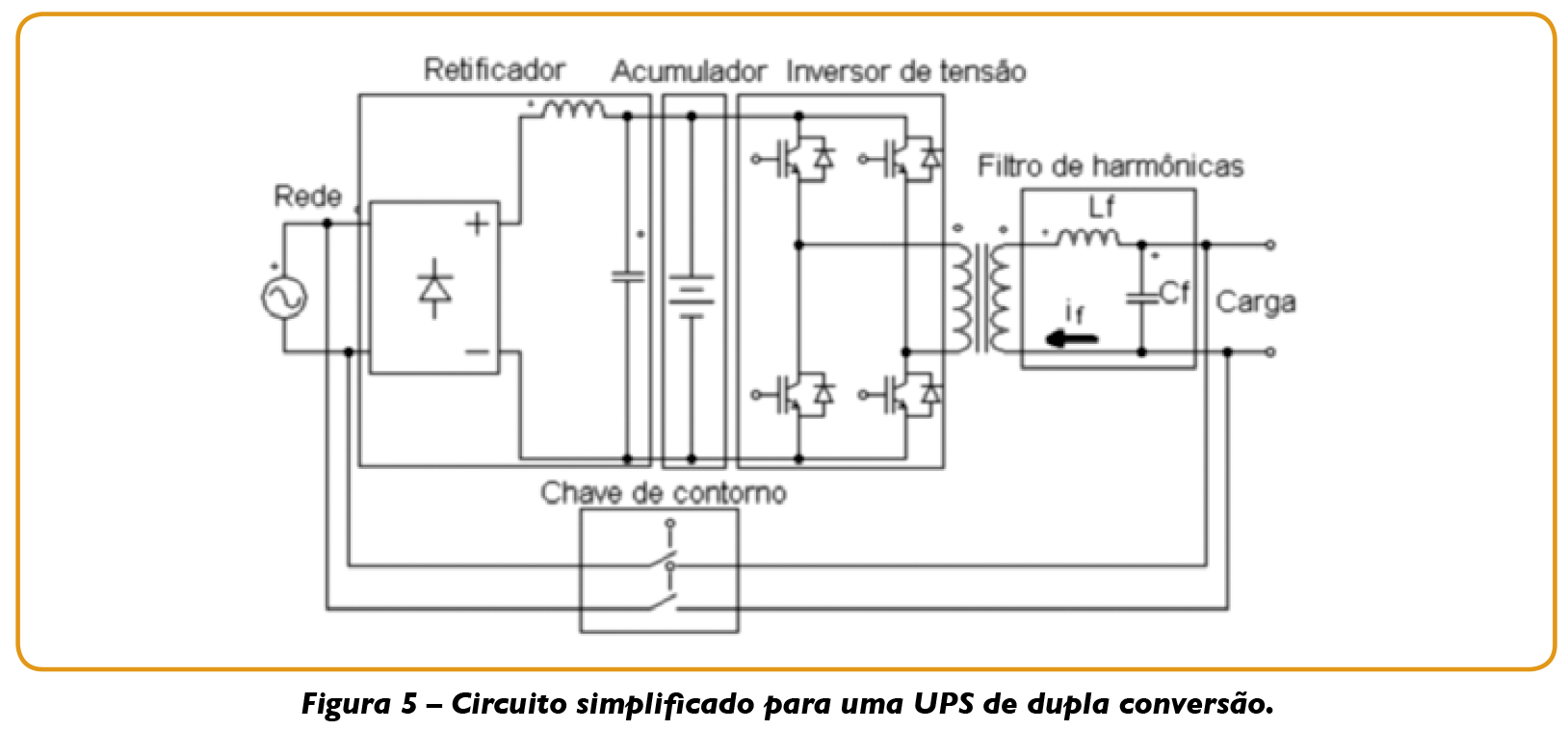
Na etapa de saída do sistema é comum a existência de um filtro LC (Figura 5) ou LCL para diminuição do nível de Distorção Harmônica Total (DHT) da tensão gerada pelo chaveamento, estes são amplamente utilizados por possuírem, na prática, mínima característica dissipativa. Porém, seu projeto deve levar em conta sua frequência natural de ressonância e de chaveamento do sistema.
Para se conseguir uma sintetização mais fiel de uma tensão puramente senoidal na saída, pode-se aumentar a frequência de chaveamento, transpondo o conteúdo harmônico indesejado para frequências superiores, as quais são mais fáceis de serem atenuadas com filtros de menor dimensão. Em contrapartida, tal opção pode gerar um considerável incremento das perdas no sistema, já que se aumenta o número de comutações dos semicondutores por período da tensão.
Estratégias de controle
Em um UPS, deseja-se que a tensão de saída sintetizada tenha forma de onda o mais próximo possível de uma senóide, de amplitude e frequência determinada e em fase com a rede (nas UPSs do tipo line interactive e stand-by). Além disso, é desejável uma boa resposta transitória à entrada e à saída de cargas: linear, não linear e/ou desbalanceada (no caso de uma UPS trifásica).
Sobre o controle do sistema do UPS, diversas questões podem ser levantadas, tais como: qual (ou quais) variável(is) observar e em que ordem devem ser inseridas na malha de controle (em um sistema multimalhas).
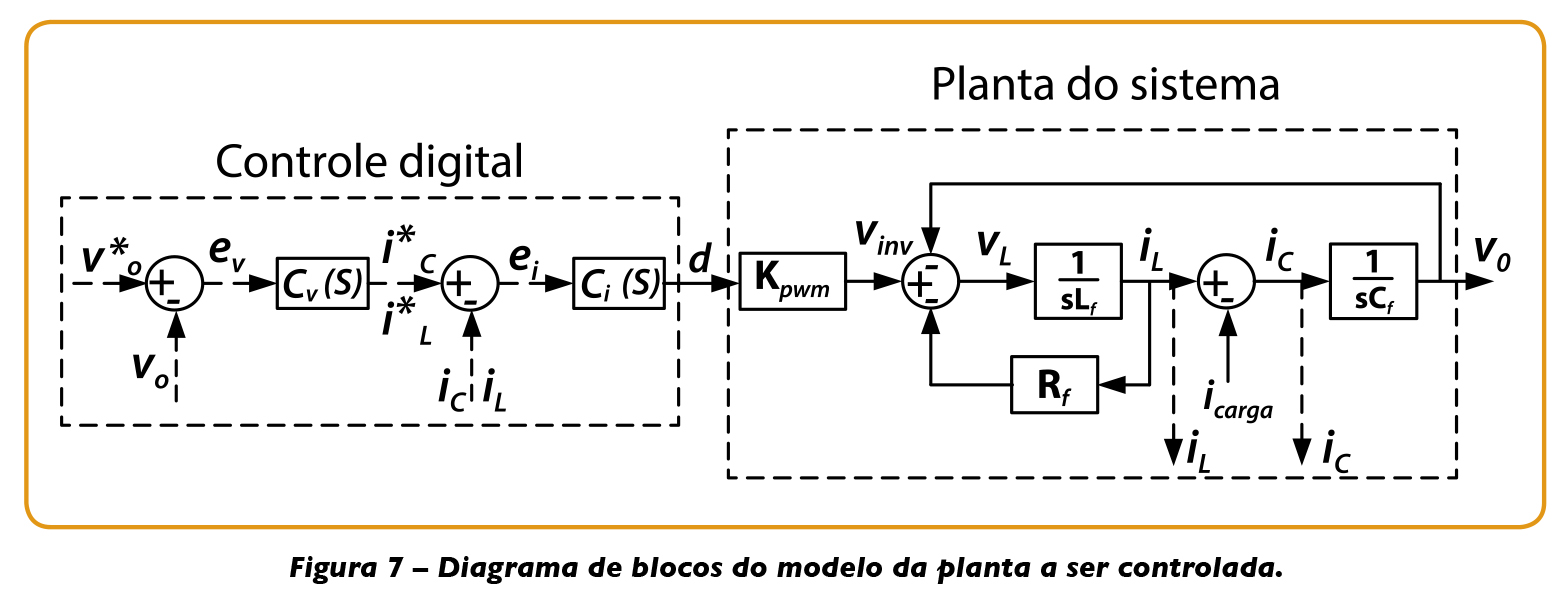
Na literatura “A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems” (ver referências), algumas destas questões são levantadas, chegando-se à conclusão de que uma boa medida é o monitoramento, simultaneamente, das variáveis de tensão de saída (v0) e de corrente (Figura 7), garantindo, assim, um bom controle da amplitude e da DHT da tensão de saída. Também propõe-se a comparação do controle com monitorando da corrente no indutor (iL) e no capacitor (iC) do filtro LC de saída. A estratégia de monitoração da corrente no indutor do filtro permite a diminuição da DHT e pode agregar benefícios adicionais, como o controle do nível médio da corrente, evitando, assim, a saturação dos elementos eletromagnéticos presentes no circuito (transformador e o próprio indutor do filtro).
Em UPSs com inversores polifásicos é comum utilizar, em conjunto com os controladores, métodos matemáticos para simplificação do modelo dinâmico do sistema. Destacam-se as transformadas αβ e dq, que convertem um sistema trifásico em um sistema vetorial em quadratura, resultando muitas vezes em valores contínuos, os quais são mais simples de serem controlados.
Controladores
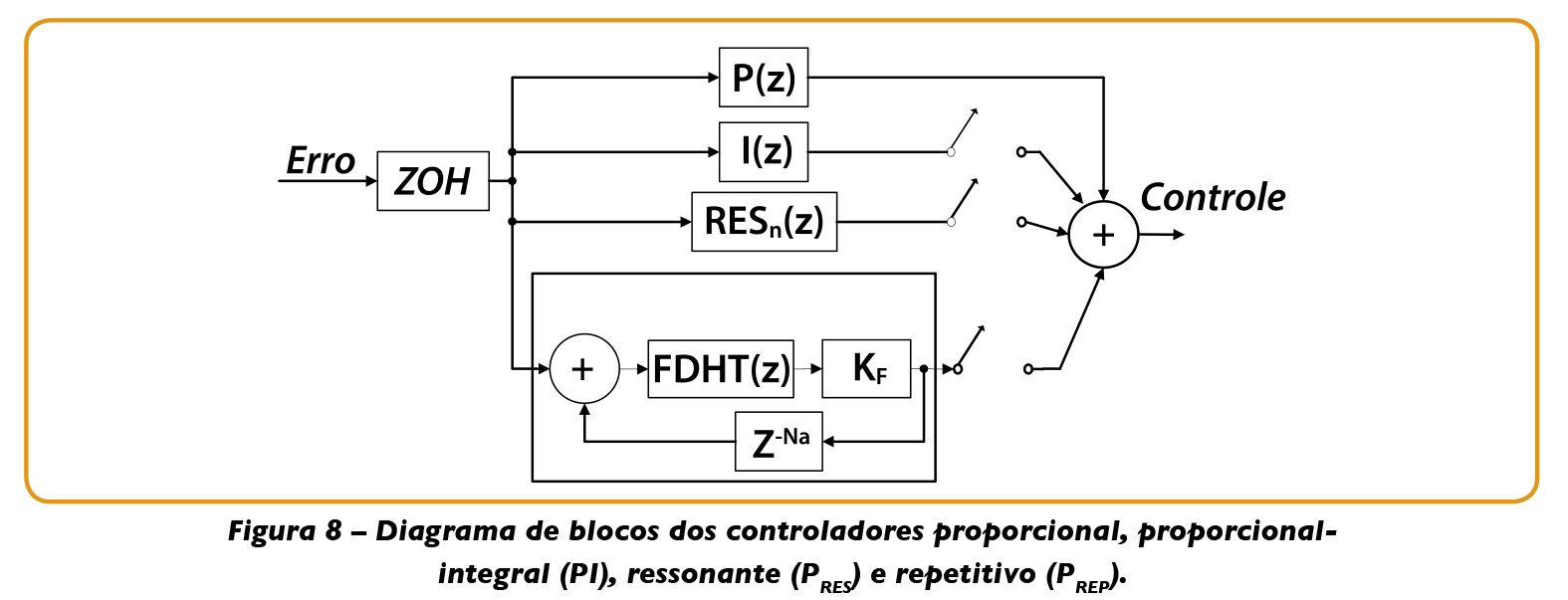
Nesse tópico são discutidos os principais tipos de controladores digitais comumente encontrados em aplicações de controle do estágio de saída de UPSs. São estes os apresentados na Figura 8, em que ZOH representa um amostrador digital; P(z) o controlador proporcional; (P(z) + I(z)) o controlador proporcional integral; (P(z) + RESn(z)) o controlador ressonante; e (P(z) + REP(z)) o controlador repetitivo, sendo que as associações entre eles ainda podem ser realizadas.
1) Controlador proporcional: é o principal tipo de controlador, sendo parte integrante de todos os demais, determinando a frequência de corte, o que reflete diretamente na dinâmica de resposta do sistema. Este faz com que a saída de um sistema acompanhe um determinado sinal de controle, porém, não garante que o erro seja nulo.
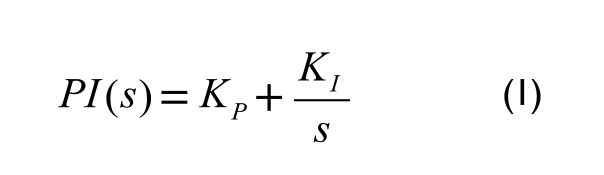
2) Controlador integrativo: corrige o erro do sistema em regime permanente. Possui melhor desempenho para sinais de referência contínuos, por apresentar ganho (teoricamente) infinito na frequência zero. Tipicamente, utiliza-se o valor eficaz (RMS) da tensão de saída como referência, porém, este cálculo gera um atraso na dinâmica do controlador, já que seu valor corresponde à característica de um ciclo completo de um sinal. O controle integrativo é utilizado em conjunto com o controlador proporcional, expresso por (1), podendo ainda ser associado a um controlador derivativo, caracterizando um regulador PID, o que aperfeiçoaria, também, a resposta transitória do sistema.
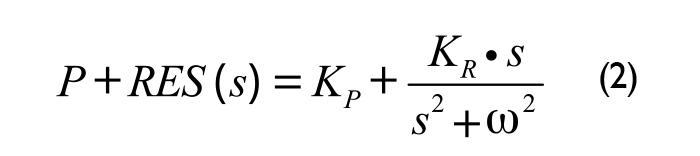
3) Controlador ressonante: possui como vantagem a característica de conseguir seguir um sinal periódico, em um UPS, sem necessidade do cálculo do valor eficaz do sinal. Como característica principal tem seu ganho tendendo ao infinito em sua frequência de sintonia (ou frequências), fazendo com que o sistema apresente erro próximo de zero em tais frequências. Sua equação é expressa em (2).
4) Controlador repetitivo: com a equação mostrada em (3), é normalmente associado a algum tipo de filtro. Na Figura 8, o bloco FDFT(z) representa um filtro de resposta finita ao impulso (FIR), baseado na transformada discreta de Fourier (DFT), responsável pela
seleção harmônica e estabilidade do sistema. Por fazer uso de uma realimentação positiva, esse controlador pode facilmente tornar-se instável e seu funcionamento consiste na inclusão de uma malha de atraso igual à Na amostras[GFM1] , fazendo com que o valor de erro atual seja somado ao anterior, amplificando sua influência sobre o controle. Todavia, devido ao algoritmo de seleção da harmônica, esse tipo de controlador torna-se custoso computacionalmente.
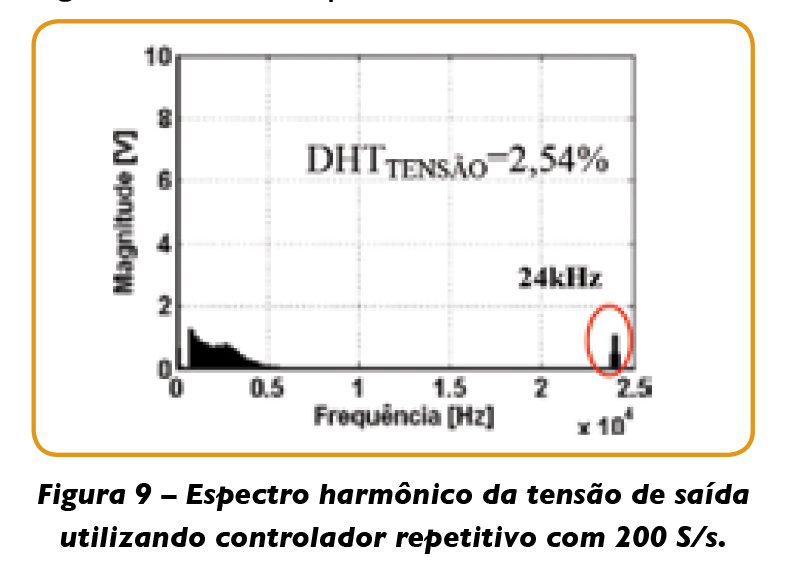
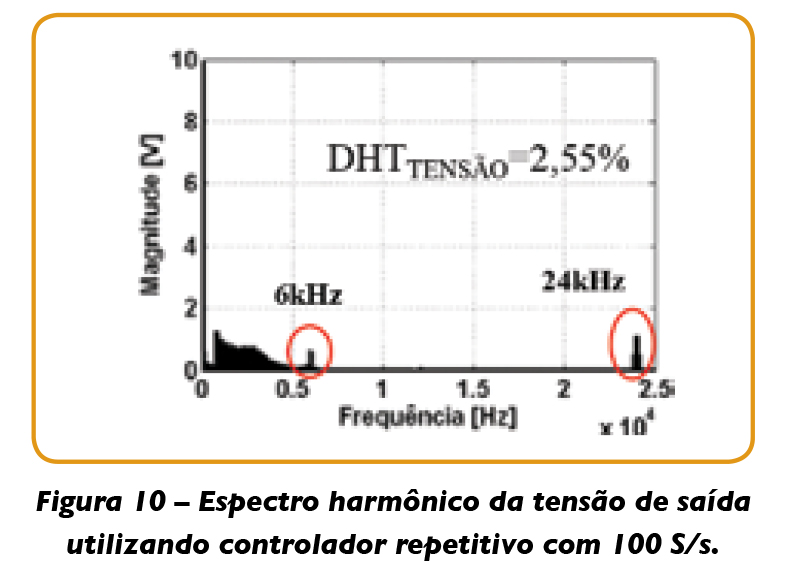
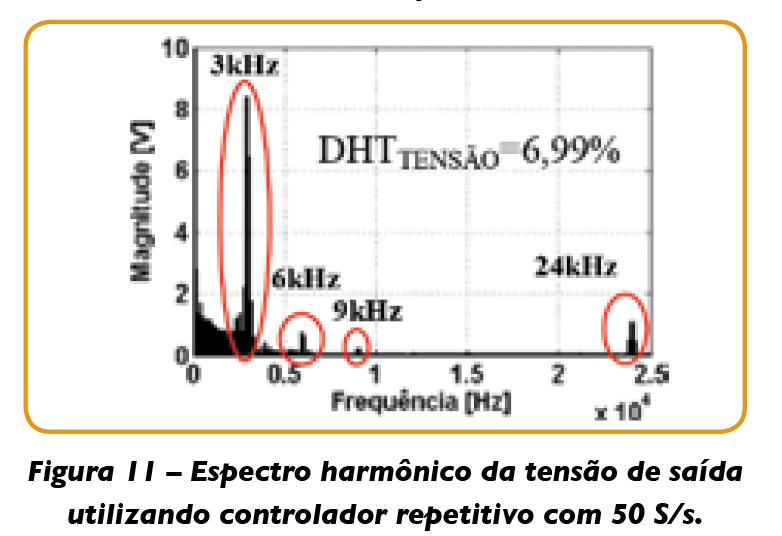
O elevado custo computacional motivou o estudo sobre a influência da taxa de amostragem e, por consequência, da velocidade de atualização da parcela repetitiva do controlador, em função da DHT gerada na tensão de saída.
Nas Figuras 9 a 11, nota-se que a frequência de aquisição do sinal influencia diretamente na distorção da tensão de saída. Verifica-se que a diminuição da taxa de amostragem do algoritmo do controlador repetitivo proporciona um aumento da DHT da tensão de saída e o surgimento de novas harmônicas, causadas pela subamostragem do sinal, como mostrado nas Figuras 9 a 11. A resposta dinâmica não se altera.
Resultados de simulações
Para o estudo do controle multimalhas, em regime permanente e transitório, foram realizadas simulações na plataforma de simulação PSIM do estágio de saída de uma UPS monofásica operando em uma situação crítica (ou seja, carga não linear de potência nominal igual à potência nominal da UPS). O controlador foi implementado em linguagem C por meio de uma DLL (Dynamic Link Library), a qual era interpretada pelo simulador.
Avaliação do controle em regime permanente
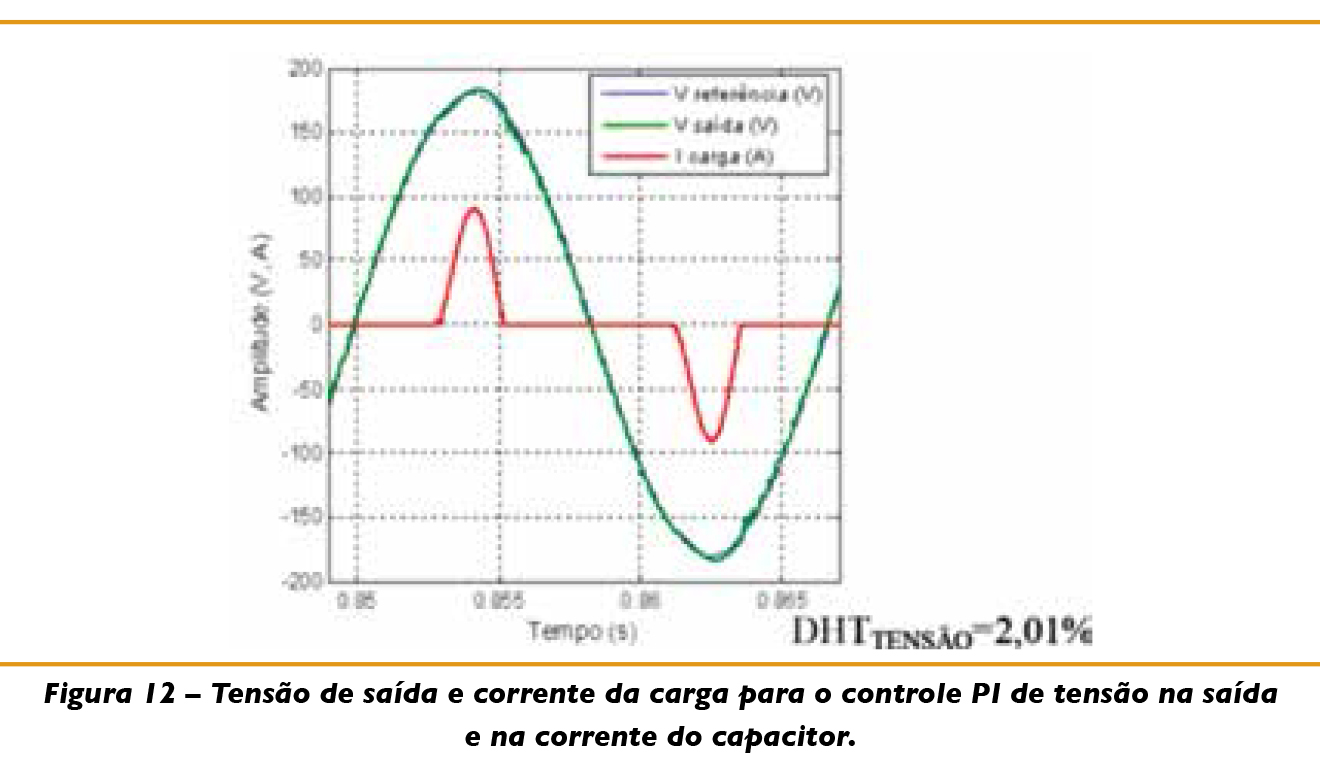
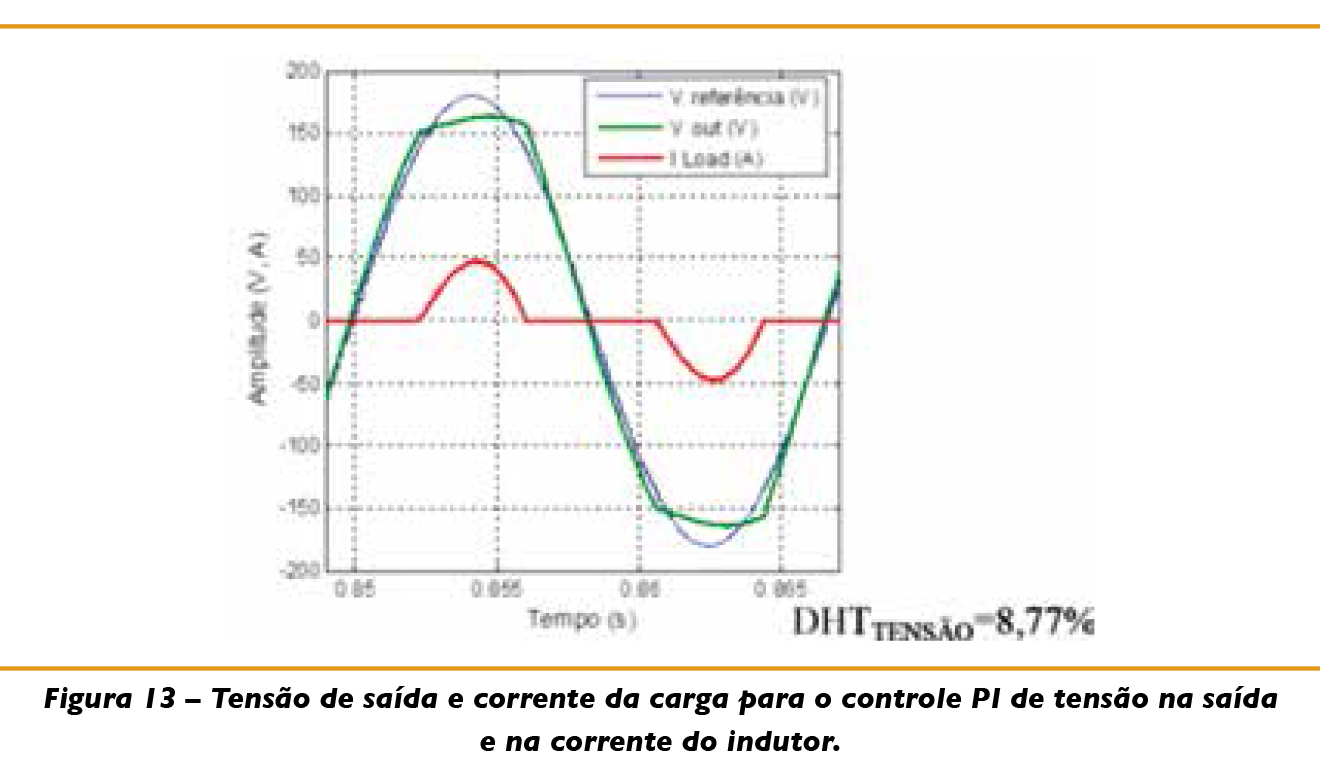
Considerando uma tensão de referência de 127 VRMS em 60 Hz, com controle multivariável da tensão de saída e corrente no capacitor (ic), obteve-se a resposta apresentada na Figura 12. Na Figura 13, tem-se a tensão de saída com o controle da tensão de saída e corrente no indutor (iL).
O controle com iC apresentou harmônicas de alta frequência com valores acima do permitido, o que já não ocorre no controle com iL. Contudo, esse controle é mais vulnerável na corrente da carga, o que pode ser visto na Figura 13 (a tensão de saída não acompanha perfeitamente sua referência durante o período em que a carga exige corrente).
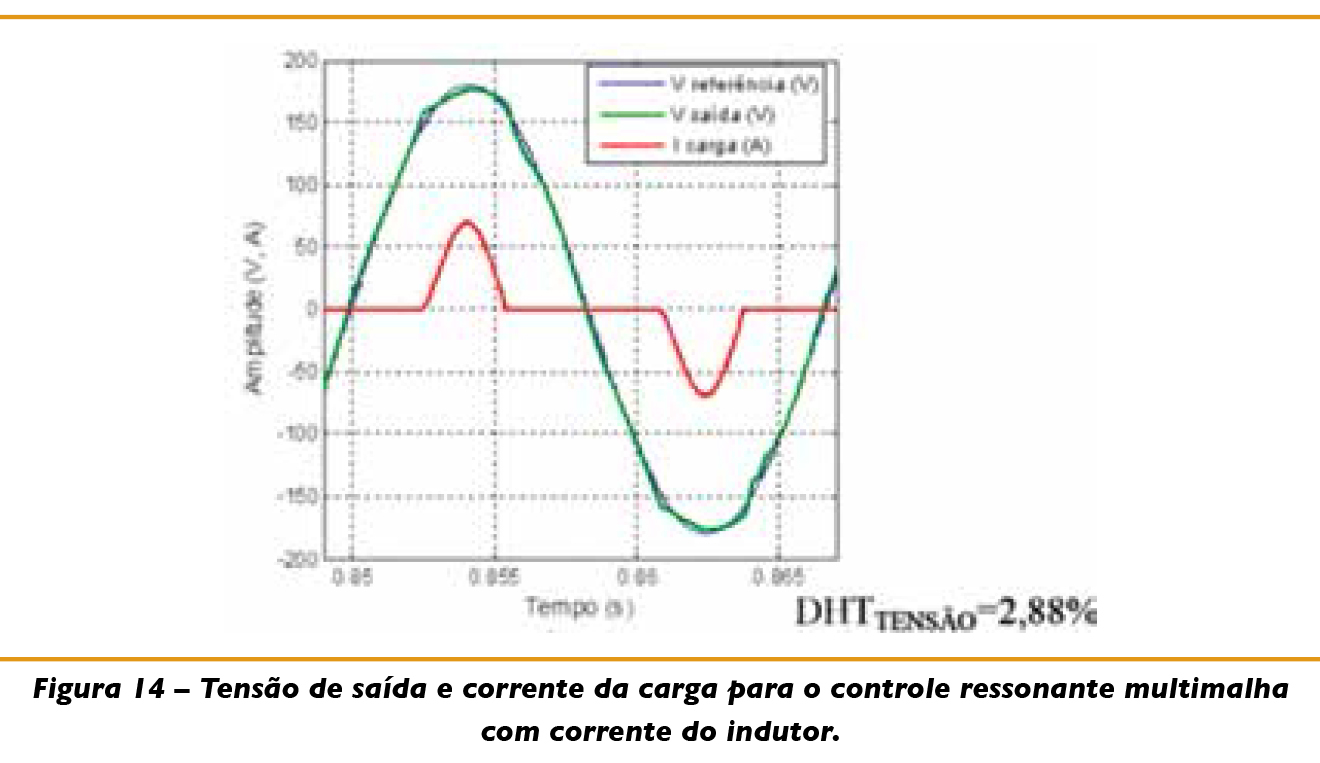
Assim, a distorção harmônica foi elevada para 8,77% e o nível de 3ª e 5ª harmônica ultrapassou os limites da norma IEC 62040-3. Para que o sistema se enquadrasse aos limites da norma, foi necessário implementar um controlador ressonante sintonizado nas 3ª e 5ª harmônicas. A simulação resultante pode ser vista na Figura 14, que apresenta menor índice de DHT, sendo igual a 2,88% e todas as componentes harmônicas atentas à normatização.
Avaliação do controle sob condição transitória
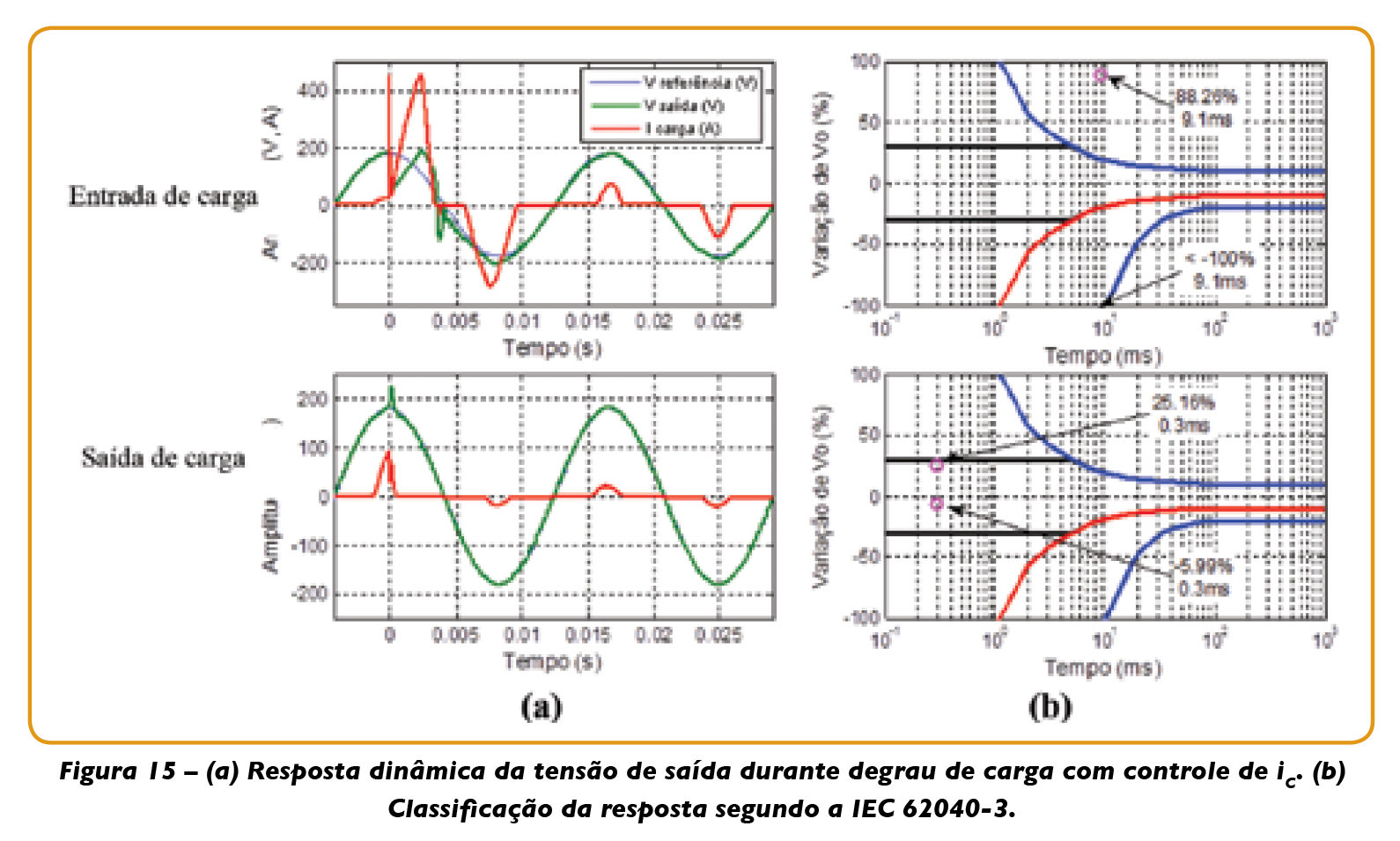
Nesse teste foi aplicado um degrau de entrada e de saída de carga não linear, começando com 20% da potência nominal do UPS, passando para 100% e, por fim, retornando a 20%, conforme recomendação da IEC62040-3.
Primeiro, considera-se o controle multimalha com a corrente no capacitor (Figura 15), em que se mostra que o transitório de entrada da carga foi crítico, provocando uma grande oscilação da tensão de saída. A duração do transitório foi de aproximadamente 9 ms, assim os erros obtidos extrapolaram as três categorias definidas pela norma IEC62040-3. Já a resposta ao degrau de saída de carga foi menos crítica, pois o controle conseguiu estabilizar a saída em menos de 0,5 ms, com erros dentro dos limites da classificação 1 para UPSs.
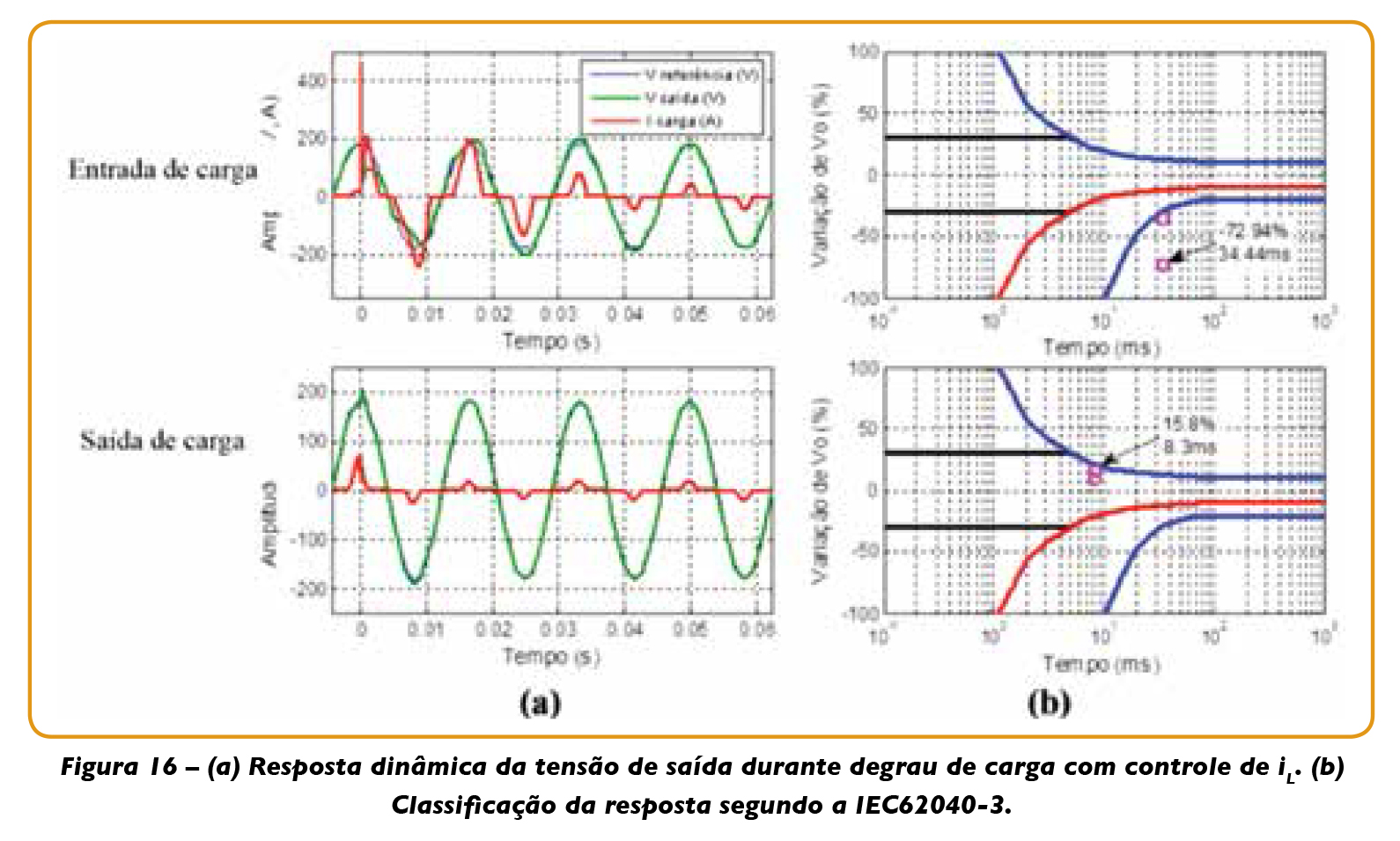
O controle com corrente do indutor foi testado nas mesmas condições anteriores. A Figura 16 mostra que o controle possui um erro semelhante durante o degrau de entrada de carga, com um afundamento de 70% de tensão em relação à referência, tendo tempo de acomodação de 34 ms, assim ele não atende às classificações, exatamente como o controle anteriormente avaliado.
Com os testes de regime permanente e desempenho dinâmico, pode-se concluir que os dois controles possuem características positivas e negativas opostas. O controle com corrente do capacitor possui um excelente comportamento em regime permanente, superando o controle com corrente do indutor. Por outro lado, durante transitórios da carga, apesar de ser mais lento, o controle com corrente do indutor apresenta dinâmica mais suave que aquele com corrente do capacitor, alimentando a carga com menores variações de tensão durante o transitório de carga.
Outro ponto positivo em utilizar o controle com a corrente do indutor é sua frequência de amostragem. Como o capacitor drena todas as correntes harmônicas de alta frequência geradas pelo chaveamento do PWM, deve-se impor uma alta taxa de amostragem para que o sinal de corrente do capacitor seja exibido com fidelidade. Porém, todo o desenvolvimento dos controladores foi baseado na taxa de aquisição fixa de 12 kHz, assim a corrente do indutor, que praticamente não apresenta as harmônicas do chaveamento é melhor exibida, gerando maior eficiência em seu controle.
Resultados experimentais
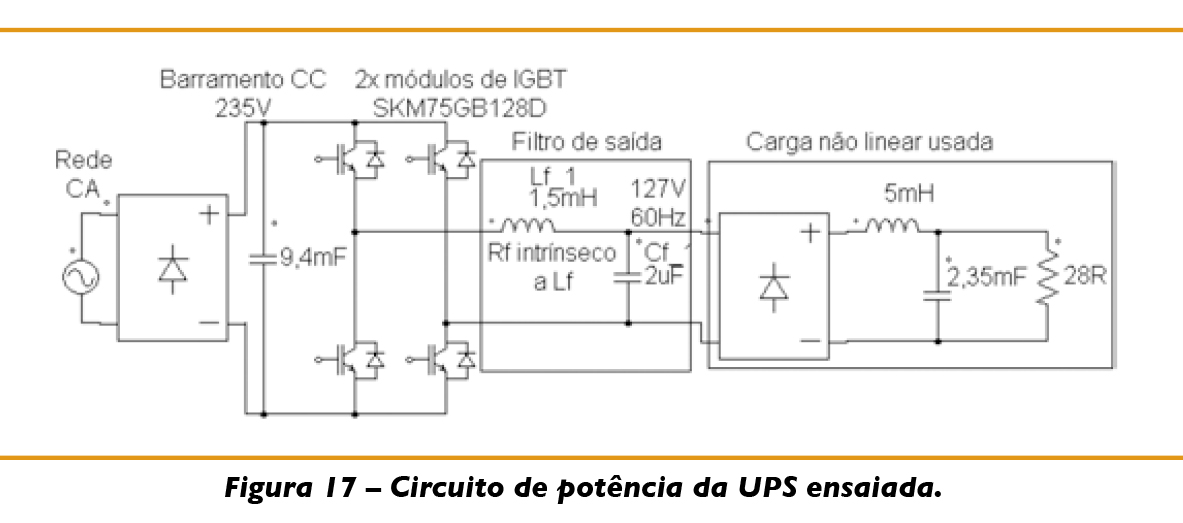
Para validação e comparação entre os diferentes tipos de controladores, montou-se o circuito da
Figura 17, sendo cada controlador implementado em linguagem C no DSP de ponto fixo.
A seguir, é comparada a resposta da tensão de saída do UPS utilizando cada um dos controladores apresentados na seção III (PI, PRES e PREP), por meio da DHT da tensão.
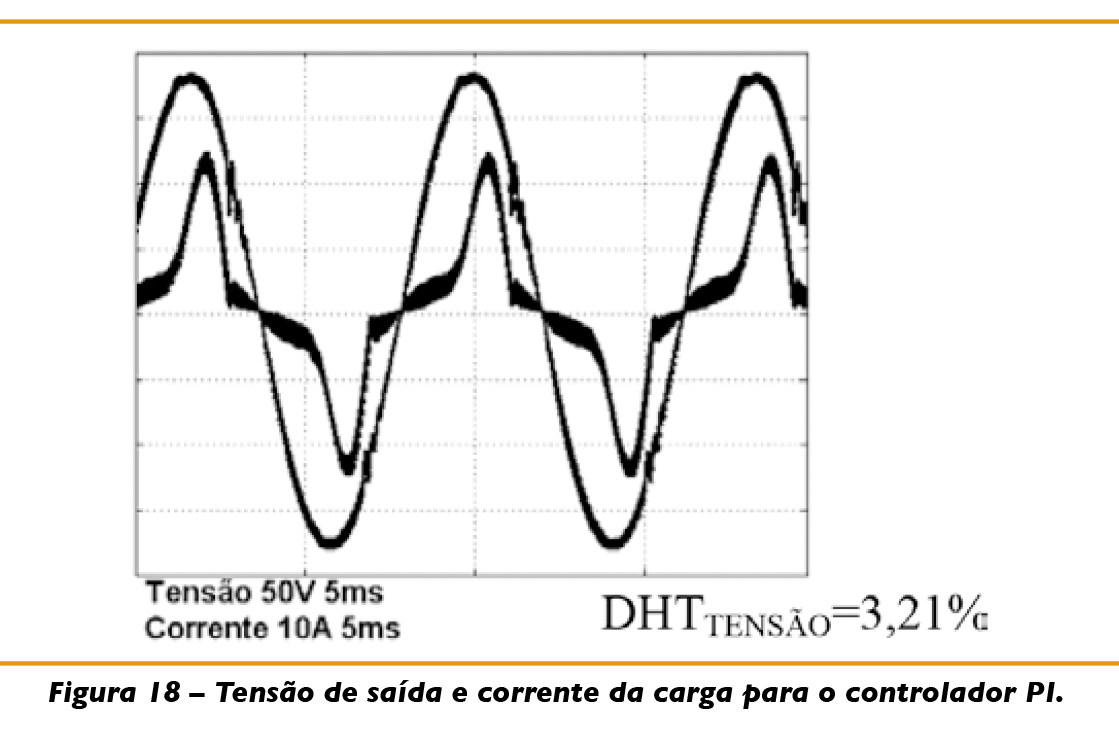
Escolheu-se uma carga com não linearidade bastante acentuada para destacar as distorções na tensão causadas. A Figura 18 é relativa ao resultado com controlador PI.
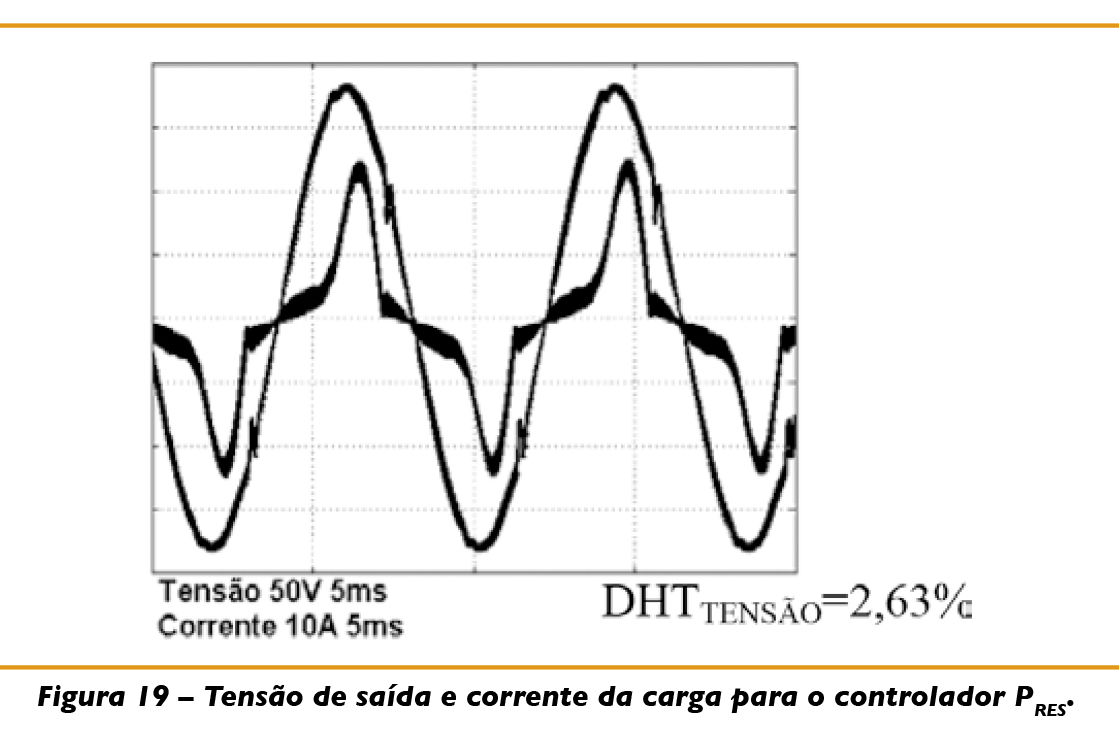
Pode-se observar na Figura 18 que o controlador PI não proporciona um desempenho ótimo, pois o sinal a ser controlado é senoidal. Em seguida, utilizou-se o controlador ressonante, na Figura 19, com frequências de ressonância na 1ª, 3ª, …, 11ª harmônicas (ímpares) do sinal fundamental.
Comparando o controlador PI com o PRES, constata-se a diminuição da DHT da forma de onda da tensão de saída, porém, ainda se observam perturbações de alta frequência no sinal de tensão devido ao crescimento e decrescimento abrupto da corrente de carga.
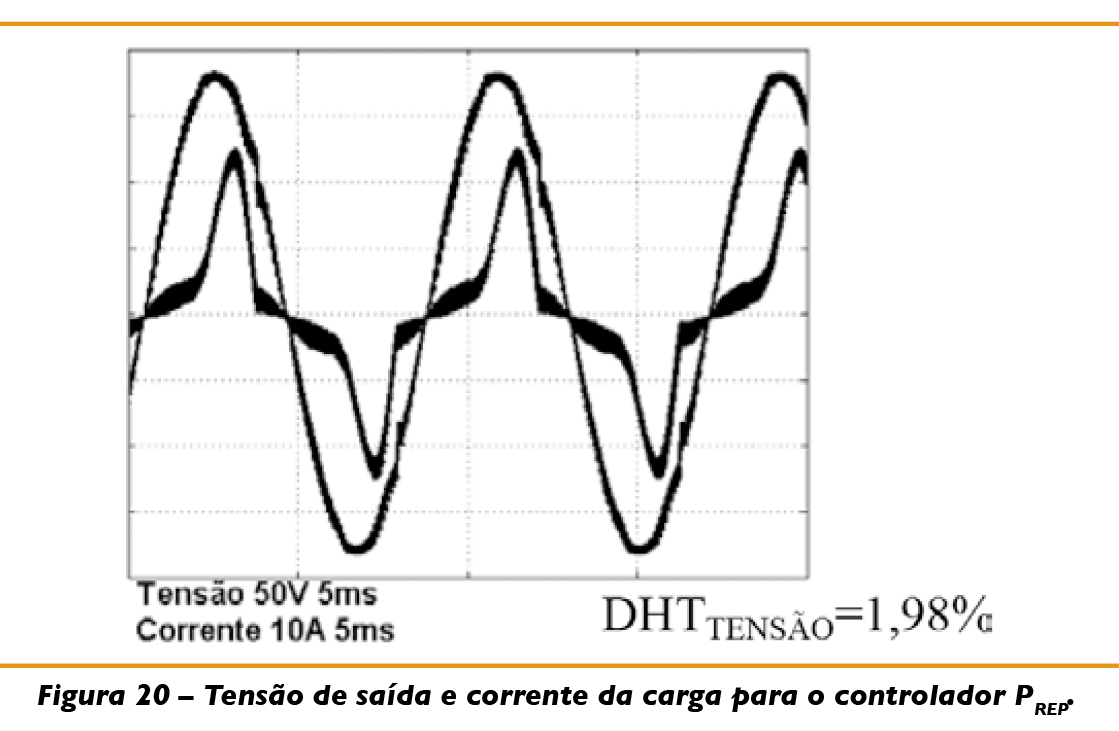
O uso do controlador repetitivo, na Figura 20, aumentou o consumo de processamento computacional do sistema, visto que em sua malha é calculada uma DFT (utilizando as mesmas frequências do PRES), o que exige grande quantidade de operações matemáticas do DSP. O PREP foi o controlador que apresentou menor DHT no sinal de saída e que, praticamente, não apresentou perturbações de alta frequência indesejáveis na forma de onda da tensão.
Conclusões
Este trabalho apresentou uma revisão sobre os principais aspectos relacionados à implementação de um UPS, desde sua classificação e normatização nacional e internacional até as principais topologias e suas capacidades de compensação.
Além disso, foram analisados os principais tipos e combinações de controladores para o estágio de saída e sua influência na regulação da tensão. Por meio do estudo da resposta transitória percebeu-se que a melhor estratégia é baseada no uso de um controlador multimalhas de tensão de saída e corrente no indutor do filtro de saída. Observando o comportamento em regime e a DHT da onda de saída, concluiu-se que o controlador repetitivo apresenta o melhor desempenho, com o menor erro de controle e a menor DHT de saída, além de amortecer mais rapidamente as perturbações de alta frequência provenientes da influência da variação de corrente da carga não linear.
Referências
[1] ZHAO, B. et al. “Next-Generation Multi-Functional Modular Intelligent UPS System For Smart Grid”. IEEE Transactions on Industrial Electronics, n. 99, p. 18, 2012.
[2] LEE, T.; KINOSHITA, M.; SANADA, K. “High-efficiency large-capacity uninterruptible power supply for 3-phase 4-wire power system”. Power Electronics and Motion Control Conference (IPEMC), 2012 7th International, China, 2012, v. 2, p. 1.131–1.136.
[3] “Uninterruptible power systems (UPS) – Part 3: Method of specifying the performance and test requirements”. International Electrotechnica Commission, p. 212, 1999.
[4] “Conversor a semicondutor – Sistema de alimentação de potência ininterrupta, com saída em corrente alternada (nobreak) – Terminologia,” ABNT/CB-03 – Eletricidade, 2003.
[5] SÖLTER, W. “A new international UPS classification by IEC 62040-3”. Telecommunications Energy Conference, 2002. INTLEC. 24th Annual International, 2002,
p. 541–545.
[6] “PRODIST Módulo 8 – Qualidade da Energia Elétrica”. ANEEL, 2012.
[7] “Recommended Practice for Emergency and Standby Power Systems for Industrial and Commercial Applications”. IEEE Std 446-1995, 1995.
[8] SKOK, S.; SKOK, M.; VRKIC, N. “Electrical performance test procedure for uninterruptible power supplies”, 2004 IEEE International Conference on Industrial Technology, 2004. IEEE ICIT ’04, Dec., v. 2, p. 667-671.
[9] LOH, P. C. et al. “A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems”. IEEE Transactions on Power Electronics, vl. 18, n. 5, p. 1.176-1.185, 2003.
[10] KIM, E.-H. et al. “Practical Control Implementation of a Three- to Single-Phase Online UPS”. IEEE Transactions on Industrial Electronics, v. 55, n. 8, p. 2.933-2.942, 2008.
[11] FLORES, J. V. et al. “Síntese de controladores repetitivos chaveados: uma aplicação a fontes ininterruptas de energia (UPS)”. Revista de Controle & Automação, v. 22, n. 2,
p. 184-200, 2011.
*HILDO GUILLARDI JÚNIOR é engenheiro eletricista e mestre em engenharia elétrica (2013) pela UNESP/Bauru. Atualmente é doutorando em engenharia elétrica pela Unicamp. É integrante do grupo de pesquisa GASI.
PAULO JOSÉ AMARAL SERNI é engenheiro eletricista, mestre (1992) e Doutor em Engenharia Elétrica (1999) pela Unicamp. É professor da Universidade Estadual Paulista (Unesp) desde 1987 e docente do Curso de Engenharia de Controle e Automação – UNESP/Sorocaba desde 2012.
DANILO IGLESIAS BRANDÃO é engenheiro de Controle e Automação pela UNESP/Sorocaba (2011) e tem mestrado em engenharia elétrica pela UNESP/Bauru (2013). Atualmente é doutorando em engenharia elétrica pela Unicamp. Desde 2008 é bolsista FAPESP. É integrante dos grupos de pesquisa DSCE e GASI.
FERNANDO PINHABEL MARAFÃO é engenheiro eletricista, com mestrado e doutorado em Engenharia Elétrica pela Unicamp. Desde 2005, é professor assistente doutor no Campus de Sorocaba da Unesp, onde liderou o Grupo de Automação e Sistemas Integráveis (GASI) de 2007 a 2011.
LUIS OTÁVIO DE PÁDUA FILHO é engenheiro de Controle e Automação pela UNESP/Sorocaba (2009). Atualmente, trabalha como engenheiro de produto pela General Motors do Brasil, responsável por sistema de aquisição e instrumentação para testes de validação em automóveis.
RAFAEL RODRIGUES DA PAZ é engenheiro eletricista e mestre em Engenharia Elétrica pela UNESP/Sorocaba (2014). Atualmente, é professor da Faculdade de Engenharia de Sorocaba.
FLÁVIO ALESSANDRO SERRÃO GONÇALVES é engenheiro eletricista (1998), mestre (2001), doutor (2005) e pós-doutor (2007) em Engenharia Elétrica pela UNESP/Ilha Solteira (SP). Em 2011 foi pesquisador visitante na Universidade de Padova, Itália. Atualmente é professor e coordenador de curso de Engenharia de Controle e Automação no Campus de Sorocaba da Unesp.